











机械手臂
 截止20260620,机械手臂课程共{6481}人学习过
截止20260620,机械手臂课程共{6481}人学习过
课程简介
【机械手臂(Robotic arm)】
机械手臂是机械人技术领域中得到最广泛实际应用的自动化机械装置,在工业制造、医学治疗、娱乐服务、军事、半导体制造以及太空探索等领域都能见到它的身影。尽管它们的形态各有不同,但它们都有一个共同的特点,就是能够接受指令,精确地定位到三维(或二维)空间上的某一点进行作业。
【科普课堂】
机械手的发展史:机械手首先是从美国开始研制的。1954年美国戴沃尔最早提出了工业机器人的概念,并申请了专利。该专利的要点是借助伺服技术控制机器人的关节,利用人手对机器人进行动作示教,机器人能实现动作的记录和再现。这就是所谓的示教再现机器人。现有的机器人差不多都采用这种控制方式。1958年美国联合控制公司研制出第一台机械手铆接机器人。作为机器人产品最早的实用机型(示教再现)是1962年美国AMF公司推出的“VERSTRAN”和UNIMATION公司推出的“UNIMATE”。这些工业机器人主要由类似人的手和臂组成它可代替人的繁重劳动以实现生产的机械化和自动化,能在有害环境下操作以保护人身安全,因而广泛应用于机械制造、冶金、电子、轻工和原子能等部门。
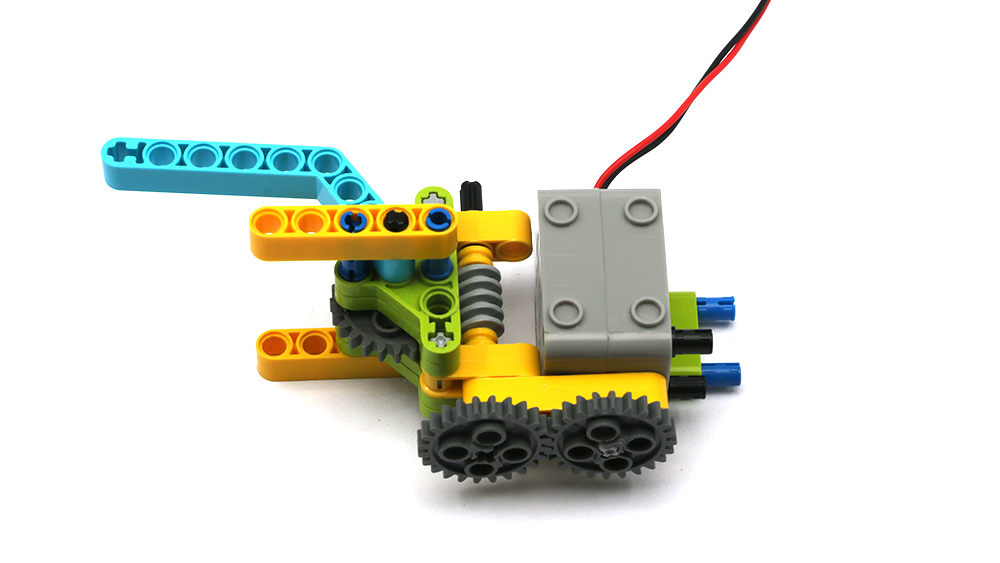
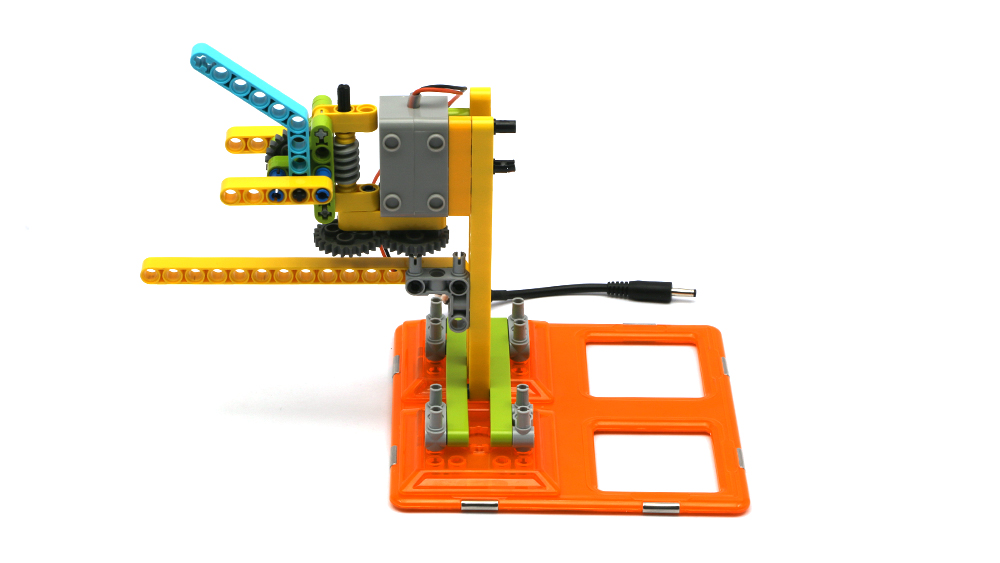
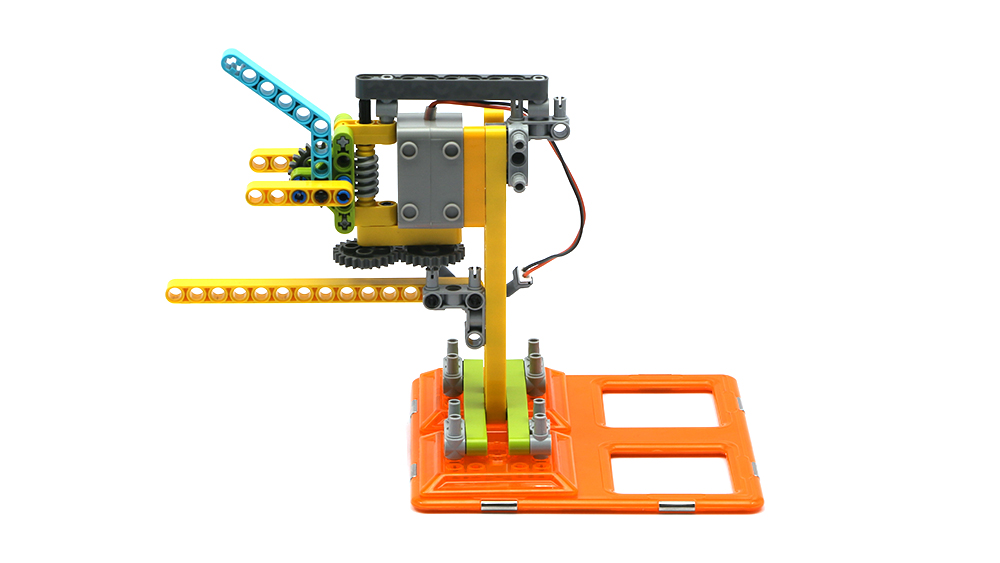
【结构介绍】
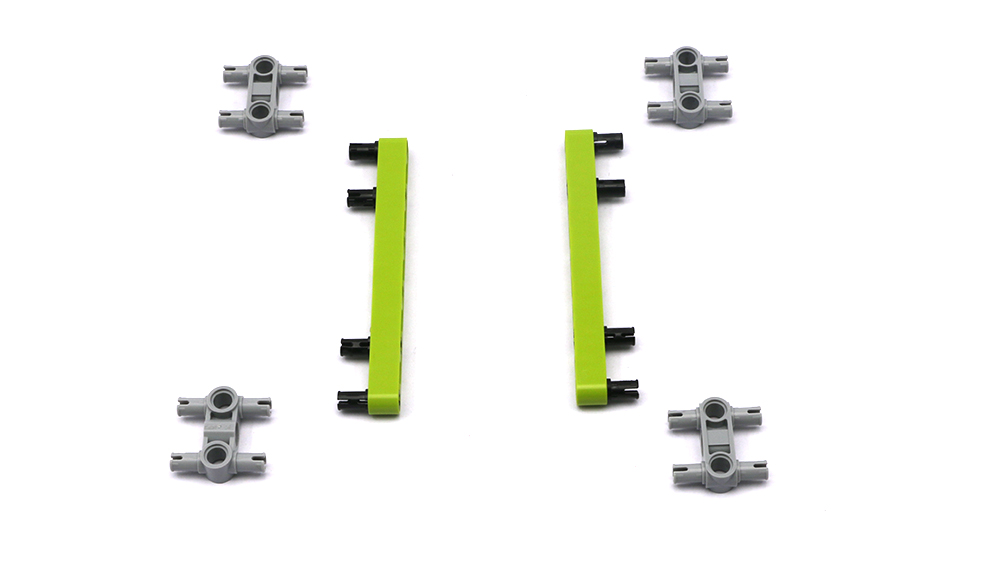
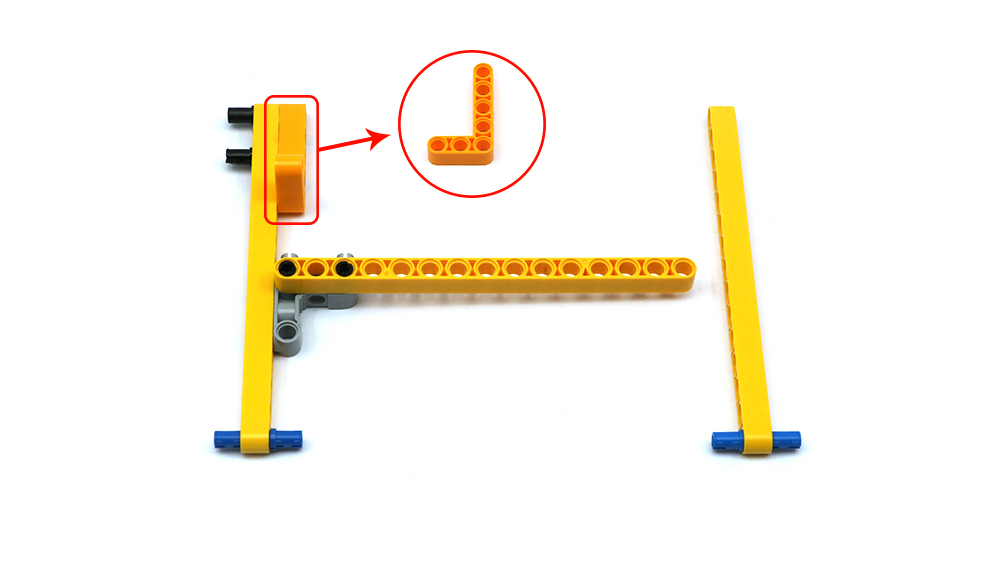
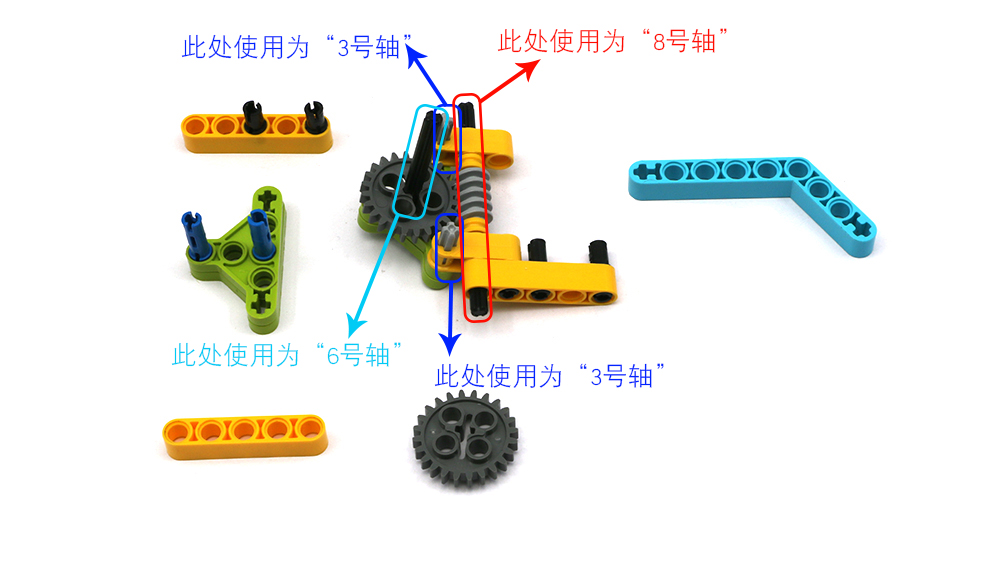
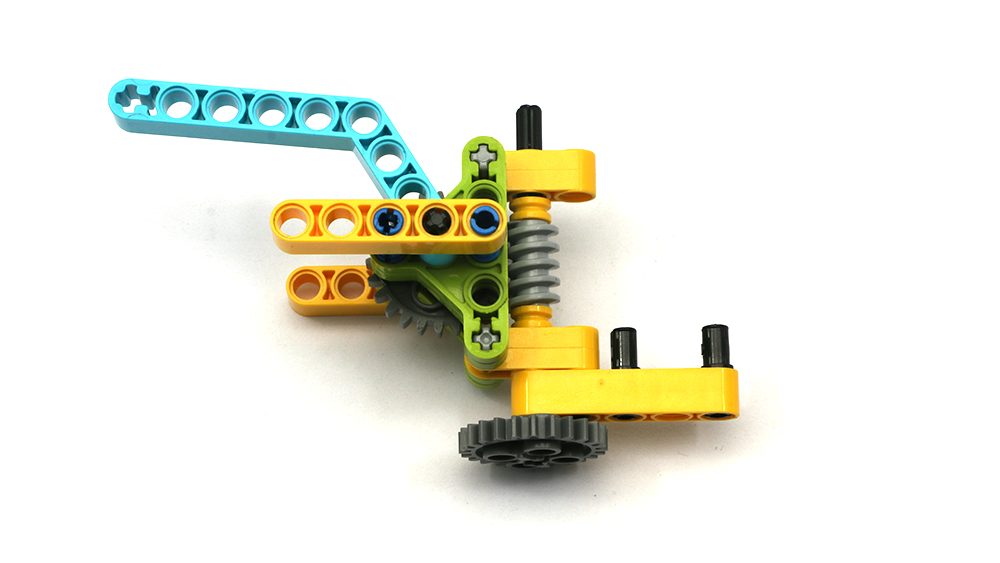
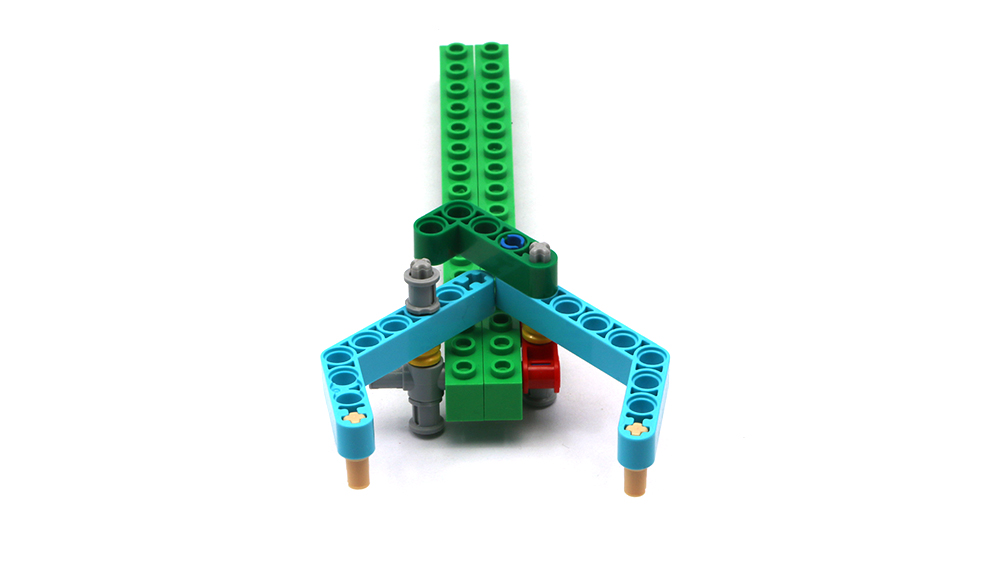
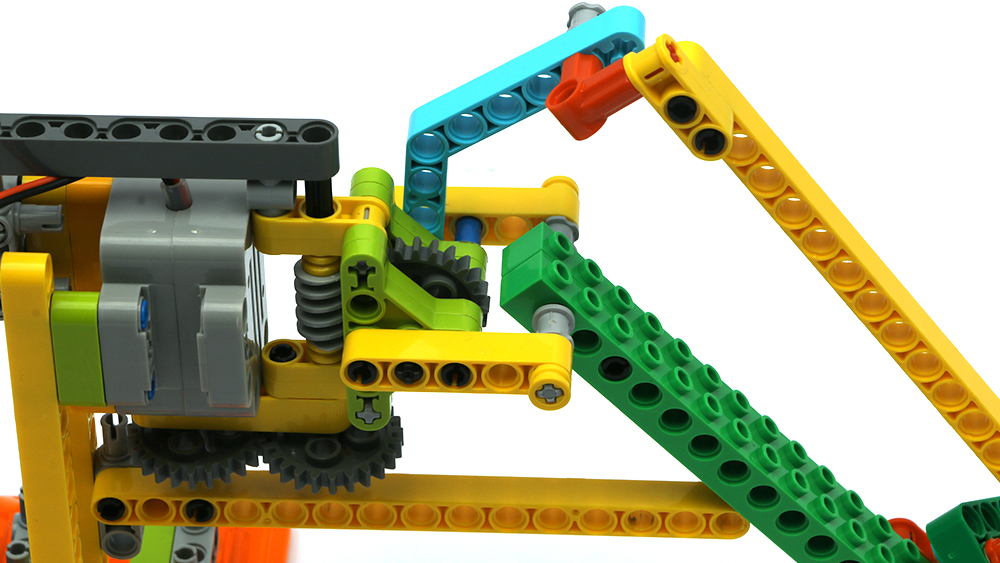
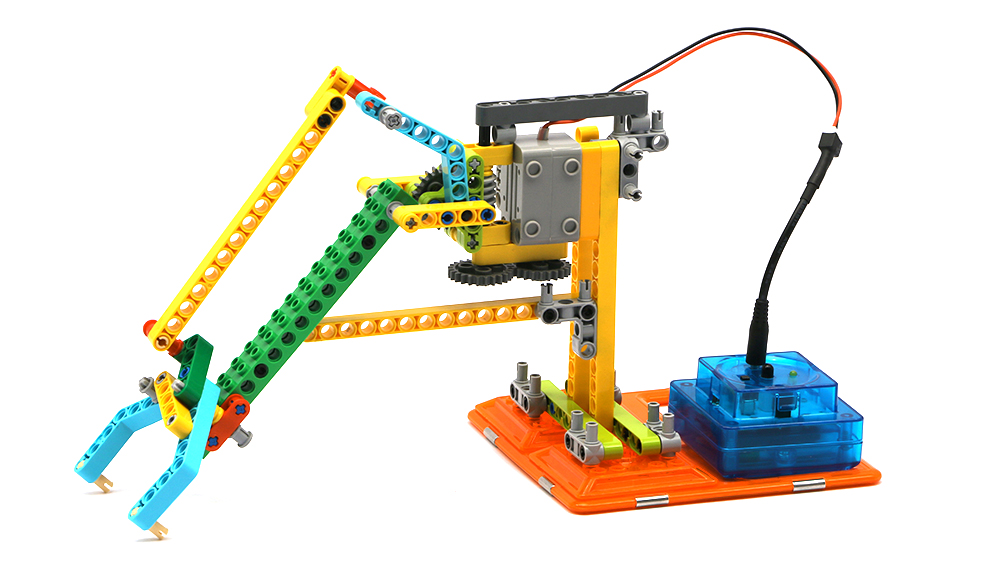
该作品的结构较为复杂,可将它分为底座,支架,机械臂,机械爪以及传动结构五个部分。底座是大正方形磁力片,使其立得更稳定。支架用到了直连杆的垂直支撑结构与连接销的固定。传动结构用到了齿轮的平行传动与蜗轮蜗杆传动,前者不改变传动速度,而后者起到了减速增力的作用。通过齿轮传动将力传递到机械臂上,当没有力的阻挡时,由于相互摩擦力的作用带动机械臂与机械爪一起运动,此时机械臂与机械爪是一个整体;当有力的阻挡时,机械臂不动,机械爪开始运动。这样就实现了一个动力源完成两个动作的效果。
【学习目标】
1、了解机械手臂的运动方式;
2、学习蜗轮蜗杆传动;
3、探究整体(臂)与部分(爪)的关系。
配件明细
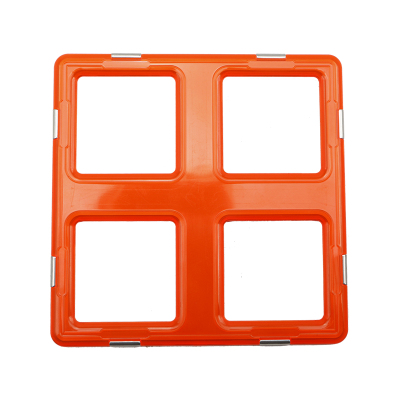
四倍大正方形*1
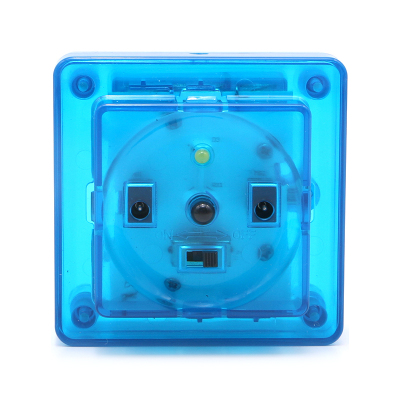
信号接收器*1
信号发射器(遥控器)*1
3孔厚连杆*1
5孔厚连杆*4

5孔直角厚连杆*1
7孔直角厚连杆*1
9孔单弯厚连杆*3

9孔厚连杆*1
11孔厚连杆*2
15孔厚连杆*3
15孔梁*2

销架*3

H型销架*5

直角销架*2

光滑销*2

摩擦销*25

光滑轴销*3

摩擦轴销*4

长摩擦销*6

24齿直齿轮*3

蜗杆*1

6#夹角连轴器*1
小颗粒转接件*2

双轴连接器*4

异面连轴双销*3

正交双轴孔连轴器*1

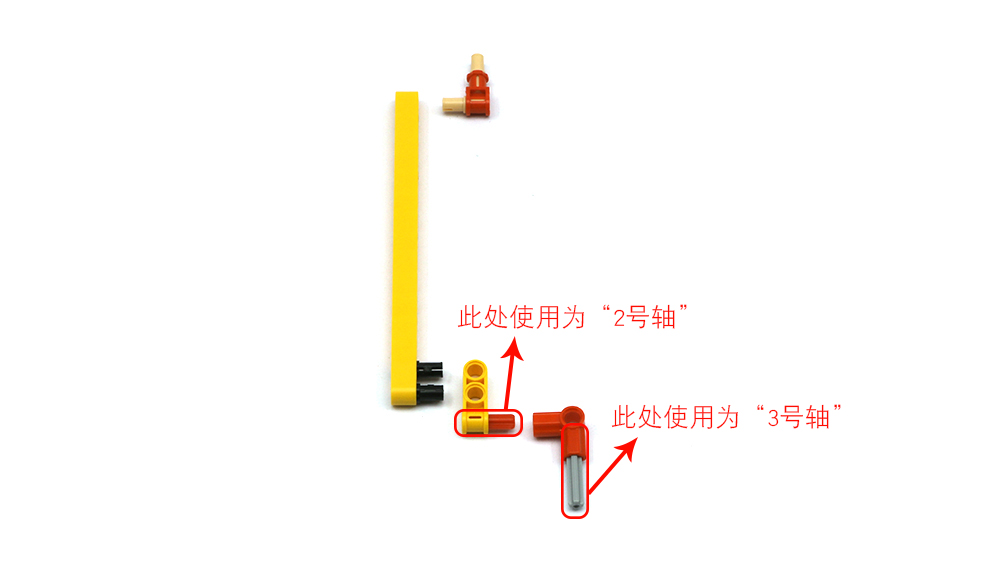
3#轴*4

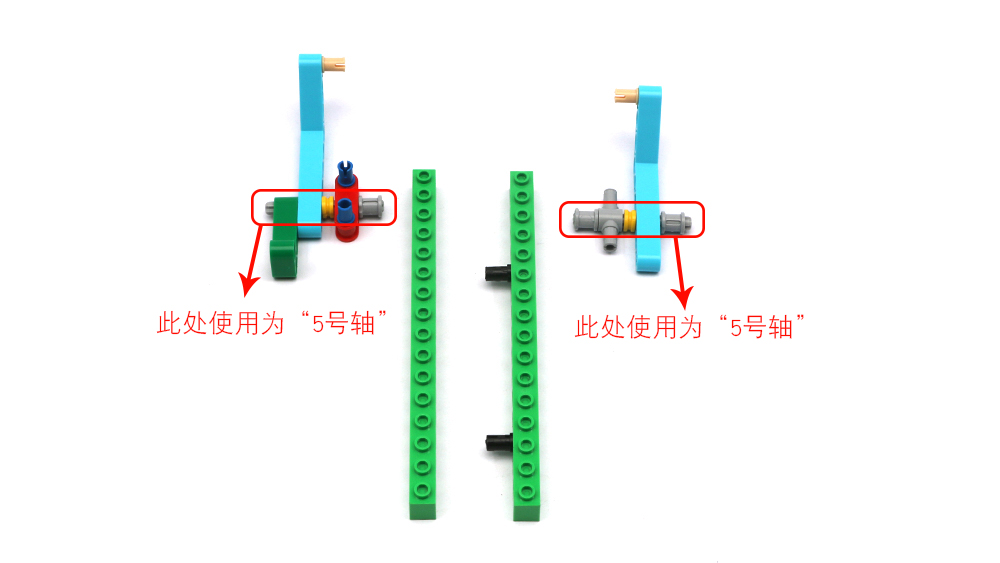
5#轴*2

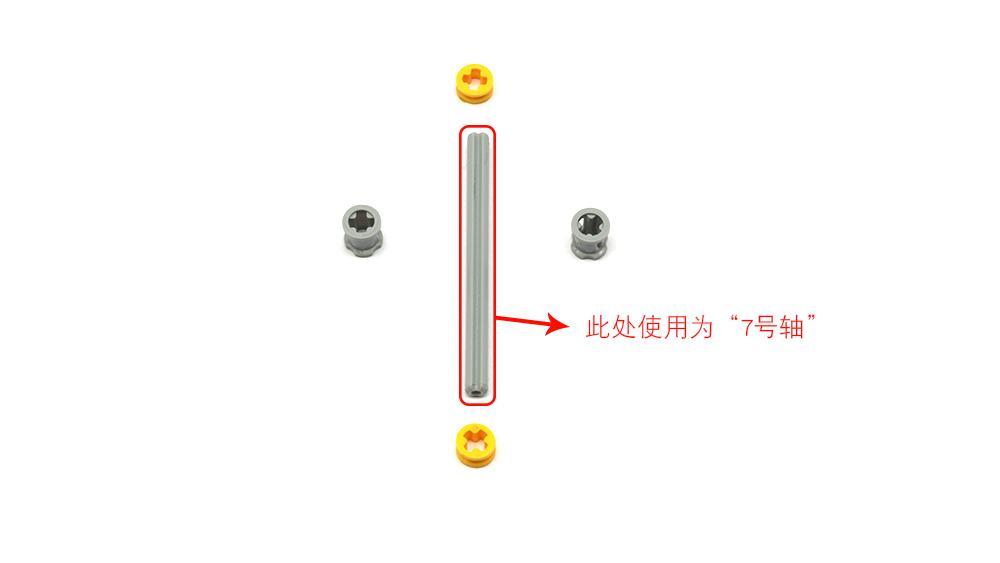
7#轴*1

8#轴*1

半轴套*6

轴套*6
电机*1

转接头*1
2#轴*1
机械手臂作品
猜你喜欢

机械手臂做好了,就缺毛绒玩具了
 踏雪寻梅
踏雪寻梅
 2019-12-27 20:55:33
2019-12-27 20:55:33
小颗粒
机械手
 0
0

我在参与MAGFX机变酷-卡未来创造者公益研学【高阶编程1922-1班学员】第【2】个作业——【安全风扇】这个风扇具有安全、节能特点,太近太远不转
茜
2019-12-28 09:48:24
小颗粒
机械手
0

机械手臂
Ya Qing Z
2019-12-28 11:33:37
小颗粒
机械手
0

安全风扇!
加了一个感应传感器,远一点风扇会转,靠近就不转了。如果现实中有这样的风扇就好了,那就不用担心孩子手被夹进去了![呲牙]
静待花开
2019-12-28 18:20:33
小颗粒
机械手
0
新编程留声机,很是不错,灯带漂亮,宝宝喜欢
段段
2019-12-28 21:58:43
小颗粒
机械手
0

新编程——感应台灯
微信用户
2019-12-28 22:37:20
小颗粒
机械手
0
我在参与MAGFX机变酷卡-高阶编程1班 第3个编程作业——【悬崖勒马】,小车遇到边缘的时候就会停下并后退
刚出土的包子
2019-12-28 22:54:51
小颗粒
机械手
0

好玩的哦
微信用户
2019-12-28 23:09:49
小颗粒
机械手
0

安全风扇
Anna
2019-12-28 23:57:45
小颗粒
机械手
0
我在参与MAGFX机变酷卡-高阶编程1912-1班,第2个编程作业——【安全风扇】依然用平板编写程序!风扇程序设计很棒,只有当移动物体距离风扇安全的距离风扇才会转动。当离风扇太近会自动停止,这样就不会被扇页打到了![偷笑][偷笑]
微信用户
2019-12-29 11:37:46
小颗粒
机械手
0
新编程
微信用户
2019-12-29 12:27:04
小颗粒
机械手
0

新编程作业代替小颗粒
?(^.^)xinxin
2019-12-29 14:30:38
小颗粒
机械手
0

