


巡线机器人
 截止20260405,巡线机器人课程共{3.4万}人学习过
截止20260405,巡线机器人课程共{3.4万}人学习过
课程简介
配件明细

正方形*12

常规长方形*1

等边三角形*6

常规等腰三角形*4
高速电机(黄色)*2
正方形连接窗*4
等腰三角形连接窗*2
短连接杆*4

连接管*3

短连接轴*1

长连接杆*2

履带传动轮*4

履带*2
小电机链轮(链轮卡扣)*2
3孔厚连杆*2

T型厚连杆*2

摩擦销*10
小颗粒转接件*2

酷卡侠主机与MINI主机*1
双路巡线传感模块*1

20CM连接线*2

USB数据线*1

RGB超声波模块*1

编程绿色转接头*2

尼龙铆钉*5

编程电池盒*1

纸质循线地图*1
巡线机器人作品
猜你喜欢

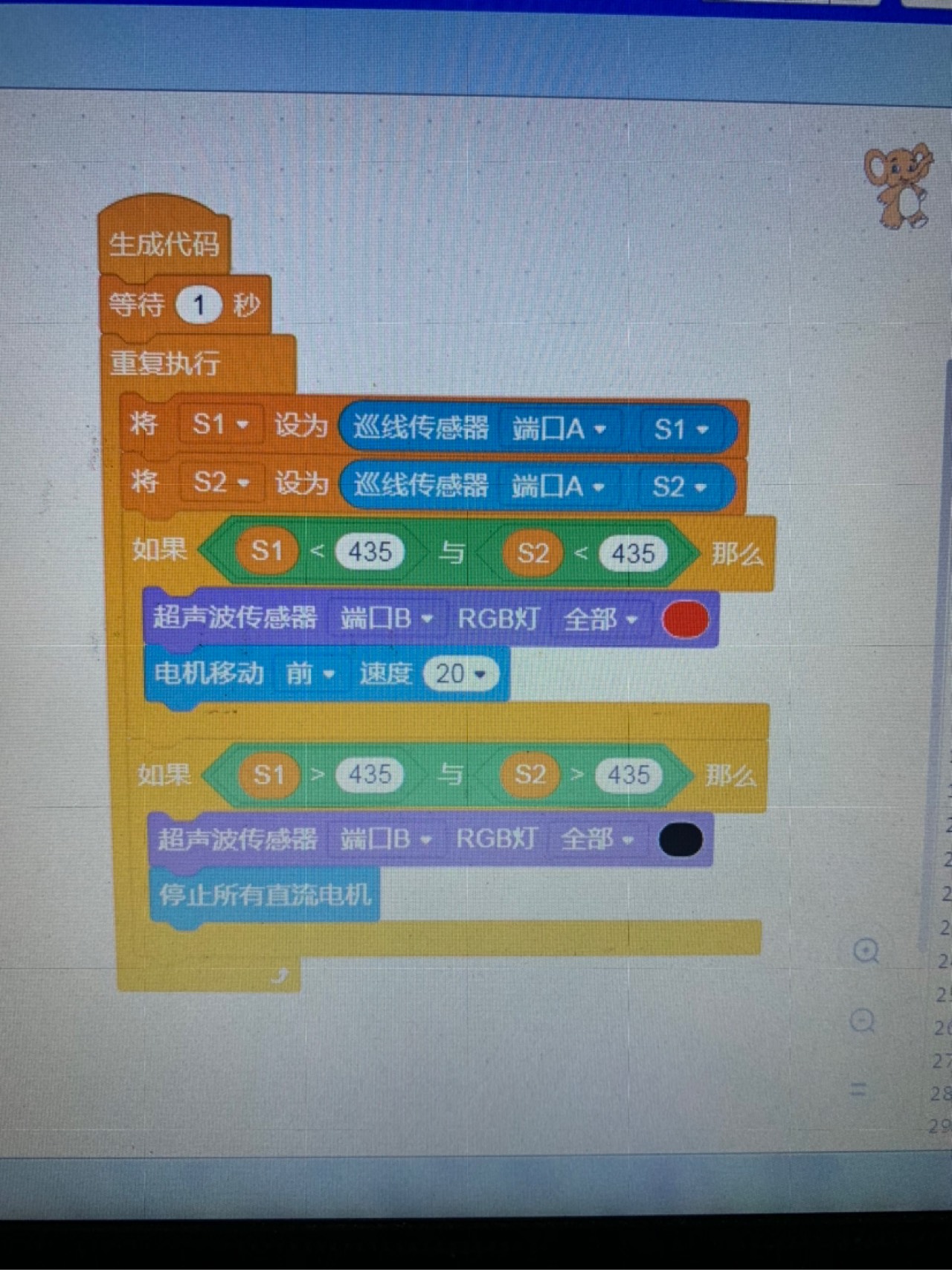
我在参与MAGFX机变酷卡-未来创造者公益研学【C200110-1班学员】第【17】个作业——【巡线机器人】+原以为很简单,看代码没几行,结果折腾了一个多小时才完成。原因其实很简单,巡线器识别率太低,若按照视频课程设置为100压根认不到黑线,最终我设为600才勉强可以运行,建议设置为700。
 汪杨@建发信息
汪杨@建发信息
 2020-06-07 00:50:31
2020-06-07 00:50:31
融合高阶编程
巡线机
 0
0

巡线机器人,我只沿着黑线走哦,前进亮绿灯,停止亮红灯。
开心市民小邢
2020-06-07 08:35:20
融合高阶编程
巡线机
0
巡线机器人制作完成,孩子超级喜欢,爱不释手。
凡心1982
2020-06-07 09:13:51
融合高阶编程
巡线机
0

我的第26个编程作业!寻线机器人!加油加油。
飞
2020-06-07 12:07:28
融合高阶编程
巡线机
0

第20个融合高阶编程作业-巡线机器人,过程还是比较波折
cathy
2020-06-07 14:15:44
融合高阶编程
巡线机
0

机变酷卡高阶融合编程第32课——巡线机器人
这个数值按教程上的100根本不行,改成650还可以
微信用户
2020-06-08 00:50:39
融合高阶编程
巡线机
0

懿懿的第35个编程作品
编程之巡线机器人,感应黑线才能行走。[愉快][愉快]
小小
2020-06-10 13:00:38
融合高阶编程
巡线机
0

我的第24个融合高阶编程:巡线机器人,感应黑线才能行走
Alina
2020-06-10 16:40:26
融合高阶编程
巡线机
0

编程作业——巡线机器人,学习使用传感器,s1,s2的数值虽环境而改变,自己取值
微信用户
2020-06-10 18:05:49
融合高阶编程
巡线机
0

这是我的【融合高阶编程课】第二十三个作业:巡线机器人,利用巡线传感器和电机配合,可爱的铆钉耽误我们机器人干活了
yu·an
2020-06-10 19:49:33
融合高阶编程
巡线机
0
我的第35个编程作业
巡线机器人,这个机器人比我开车技术好多了,笔直笔直的~
微信用户
2020-06-10 20:02:37
融合高阶编程
巡线机
0

第20个融合高阶编程-巡线机器人
熙哥
2020-06-10 21:14:03
融合高阶编程
巡线机
0

