


触摸机械爪--酷卡侠编程
 截止20260519,触摸机械爪--酷卡侠编程课程共{1958}人学习过
截止20260519,触摸机械爪--酷卡侠编程课程共{1958}人学习过
课程简介
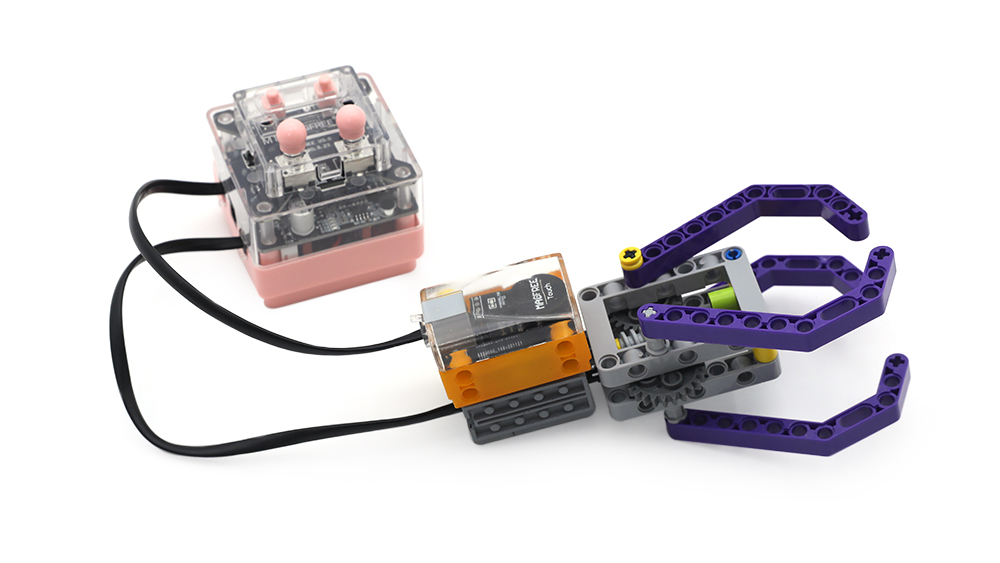
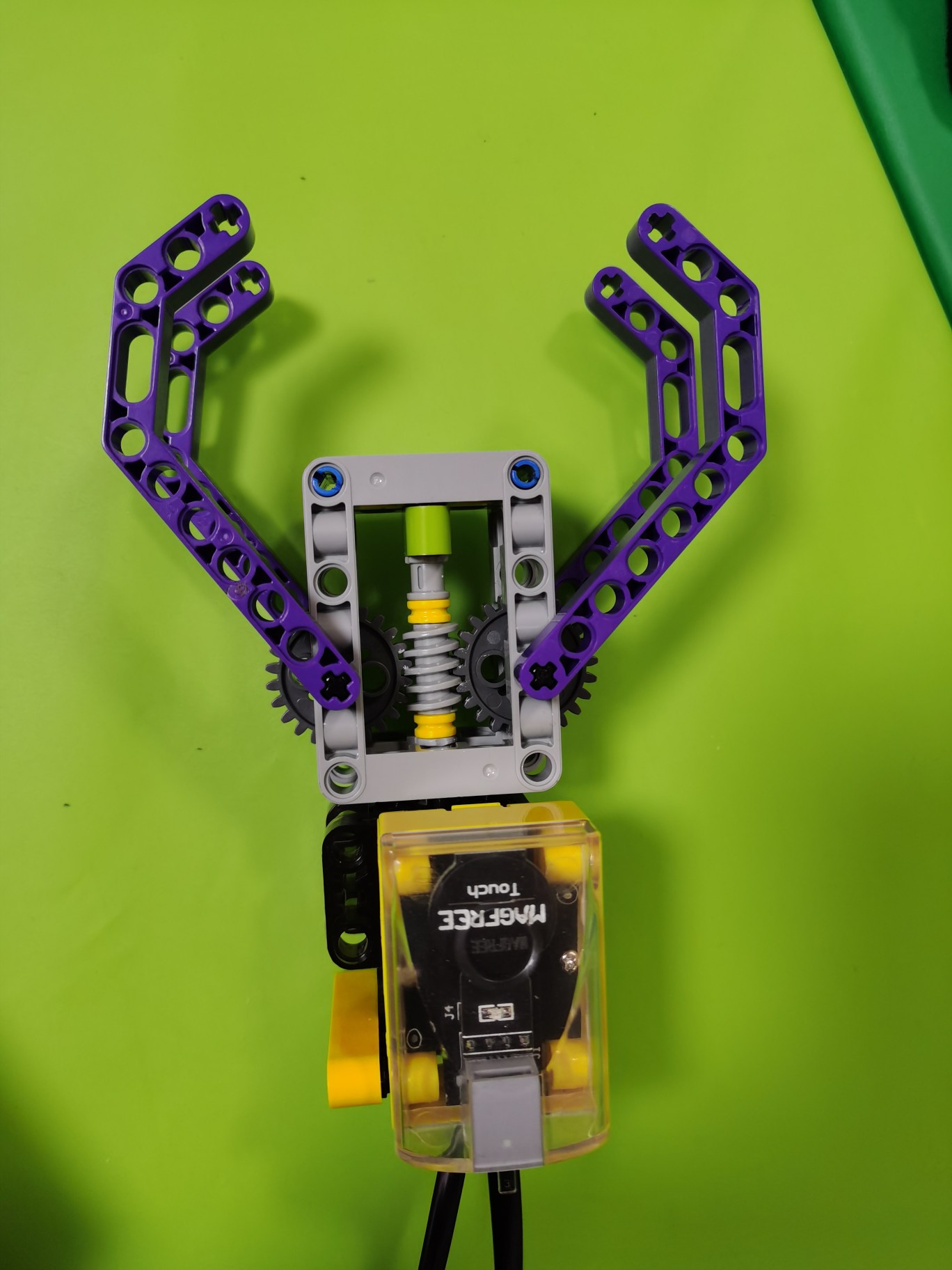
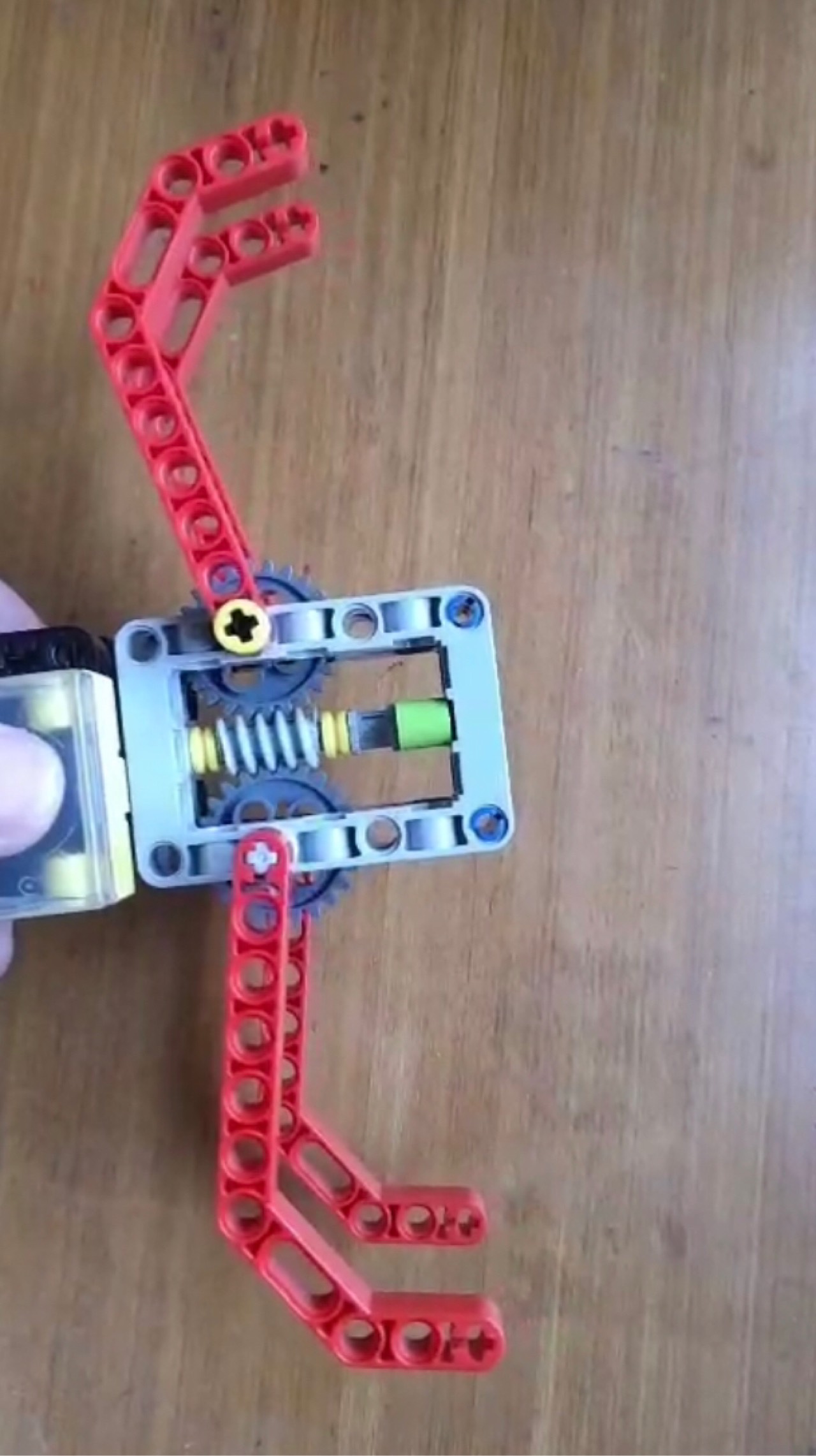
【机械爪(Robot hand)】
机器人手爪是一种可以实现类似人手功能的机器人部件。机器人手爪是用来握持工件或工具的部件,是重要的执行机构之一。根据机器人所握持的工件形状不同,手爪可分为多种类型,主要可分为三类:机械手爪,又称为机械夹钳,包括2指、3指和变形指;包括磁吸盘、焊枪等的特殊手爪;通用手爪,包括2指到5指。
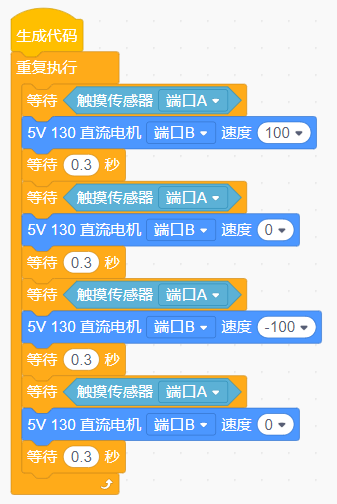
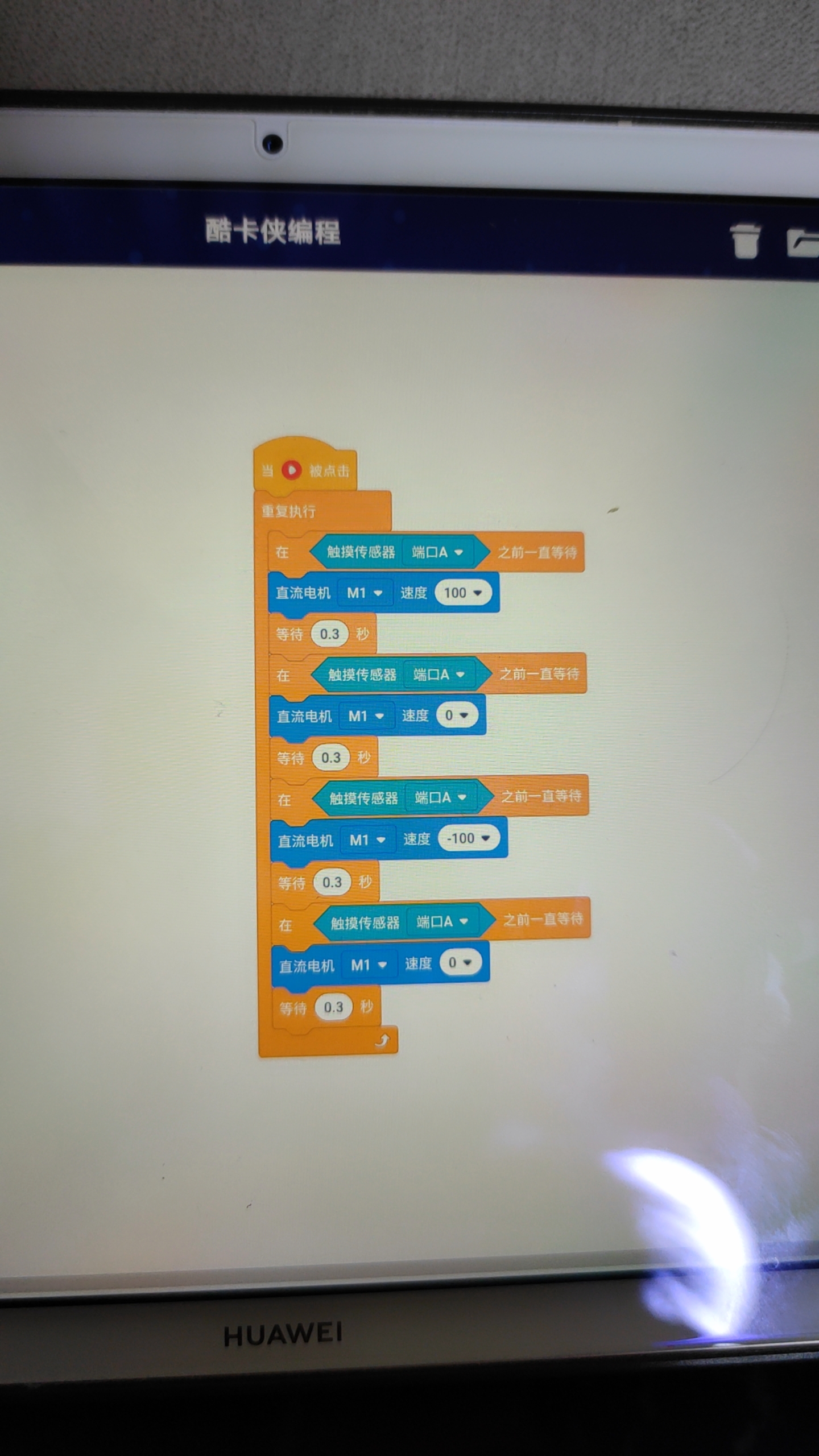
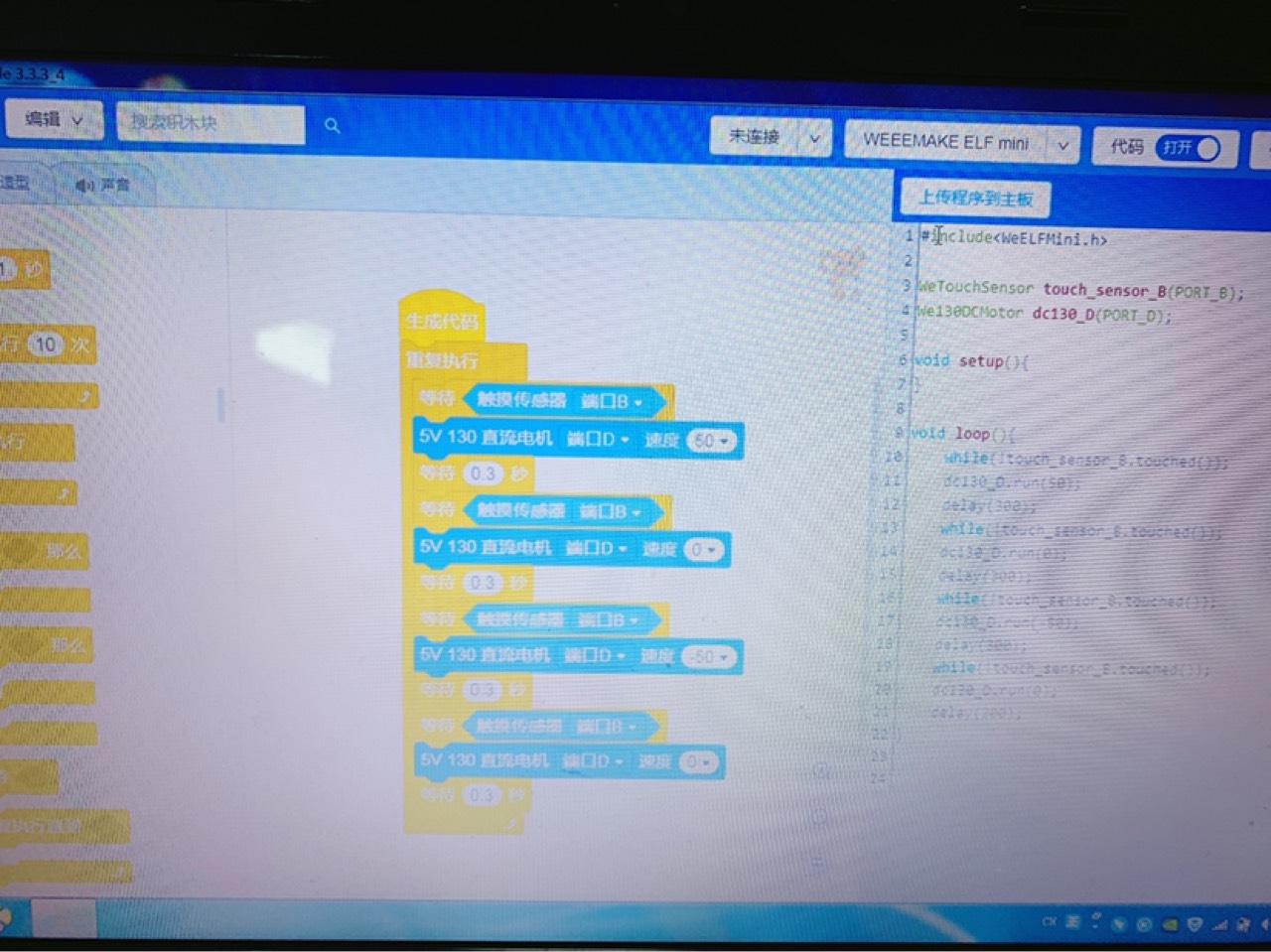
【编程思想】
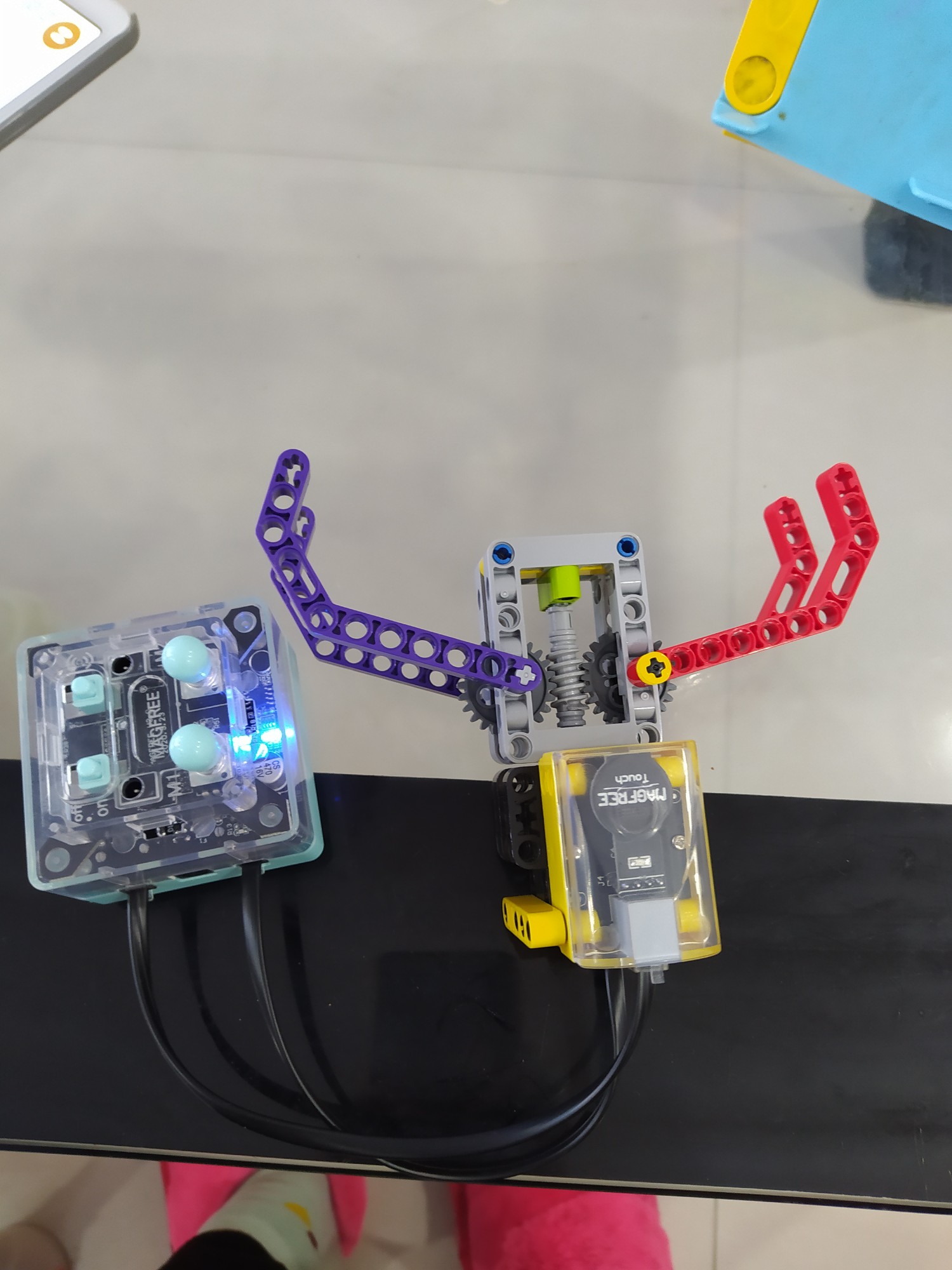
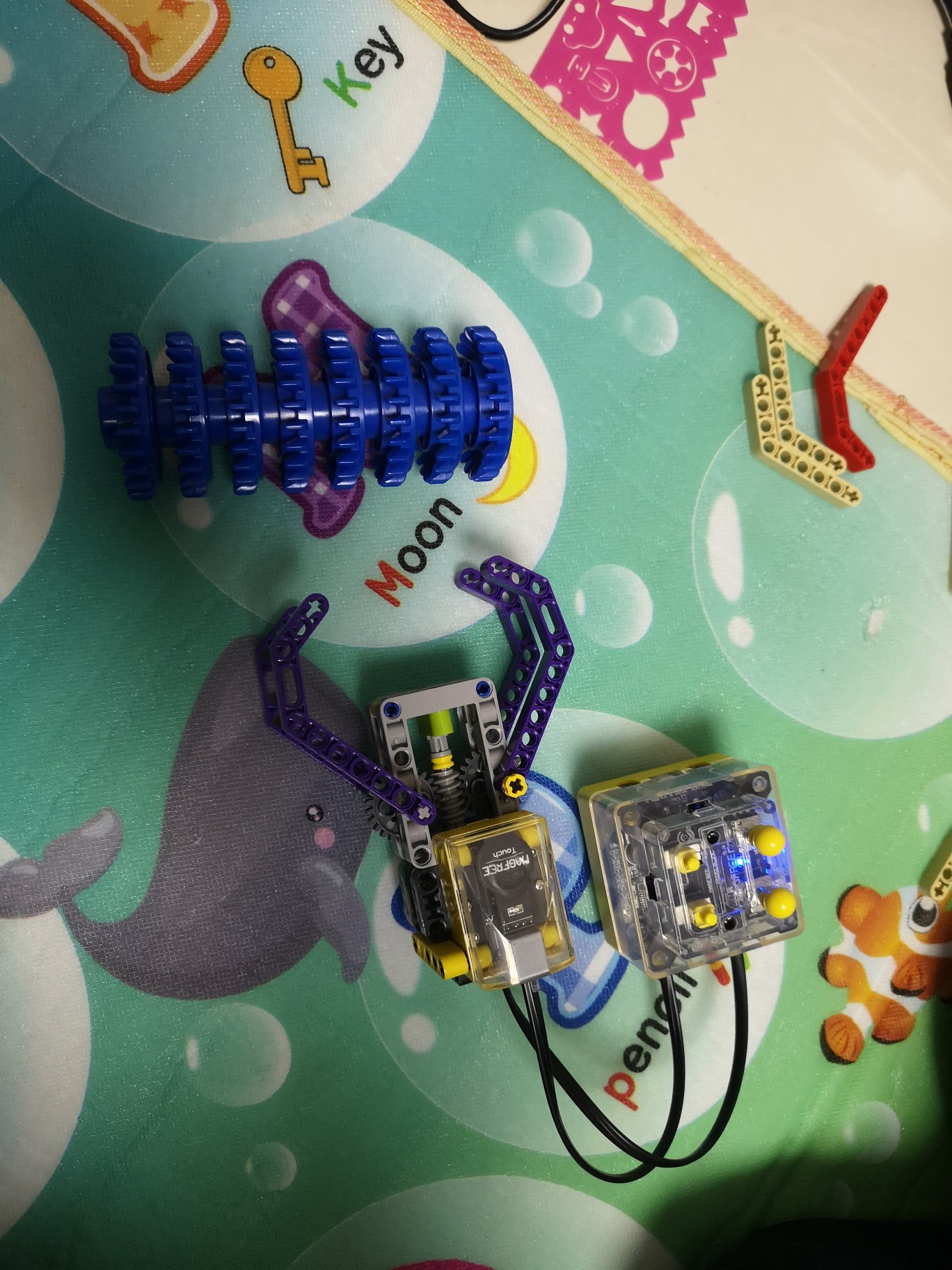
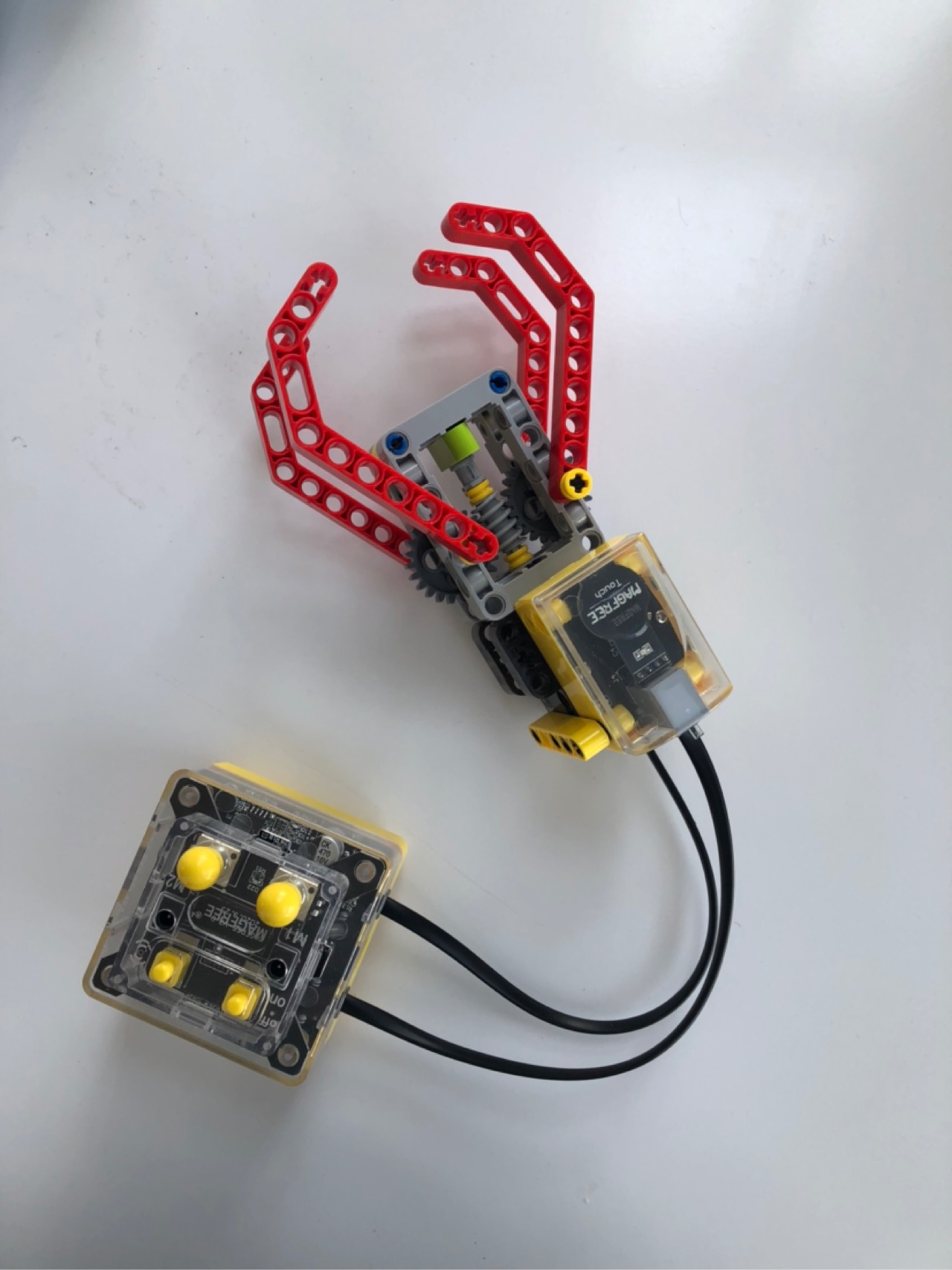
该造型模拟了机械爪,用手触摸传感器,机械爪会抓起来;再次触摸会暂停;第三次触摸会松开;最后触摸会暂停,以此重复循环。
【学习目标】
1.了解机械爪的结构功能;
2.学习双蜗轮单蜗杆结构的搭建;
3.掌握结构固定的方法。
配件明细
3孔厚连杆*1
5孔厚连杆*2

双弯厚连杆*4

5×7孔方框梁*2

摩擦销*8

长摩擦销*2

24齿直齿轮*2

蜗杆*1

6#轴*1

7#轴*2

半轴套*4

轴套*4

20CM连接线*1
酷卡侠*1

新超声波传感器*1
RJ11小颗粒电机*1
触摸机械爪--酷卡侠编程作品
猜你喜欢
机变酷卡酷卡侠编程第3个作业:触摸机械爪。
 微信用户
微信用户
 2021-01-19 11:02:40
2021-01-19 11:02:40
酷卡侠编程
触摸机
 0
0
酷卡侠机械爪
微信用户
2021-01-19 21:54:07
酷卡侠编程
触摸机
0
娃娃机,用酷卡侠比之前的那个老主机好用,用着方便,而且这个触感积木很好用
微信用户
2021-01-24 21:52:15
酷卡侠编程
触摸机
0

我的第3个酷卡侠作业触摸机械爪,非常好玩。
微信用户
2021-01-25 14:40:50
酷卡侠编程
触摸机
1
我的第4个酷卡侠编程作业:机械爪子
微信用户
2021-01-26 21:44:04
酷卡侠编程
触摸机
0
#触摸版机械爪#
越来越先进了,就像手机一样,一代换一代,哈哈哈哈哈哈,以后会不会都实现触摸屏[偷笑]
A only-妞
2021-01-29 21:44:57
酷卡侠编程
触摸机
0

我的第12个编程作业,机械抓
乌龟
2021-01-31 19:28:37
酷卡侠编程
触摸机
0
机械爪
林林子
2021-02-02 09:12:35
酷卡侠编程
触摸机
0
我的15个酷卡侠编程~机械爪
微信用户
2021-02-02 17:55:11
酷卡侠编程
触摸机
0
这是我在机变酷卡教育学院完成的第20个酷卡侠课程作业
克里斯蒂亚诺 罗纳尔多
2021-02-07 13:51:53
酷卡侠编程
触摸机
0

触摸机械爪
微信用户
2021-02-07 20:40:11
酷卡侠编程
触摸机
0

触摸电夹子,完美,老母亲都佩服自己
微信用户
2021-02-07 23:53:20
酷卡侠编程
触摸机
0

