



单杠机器人
 截止20260519,单杠机器人课程共{2341}人学习过
截止20260519,单杠机器人课程共{2341}人学习过
课程简介
【考级小贴士】
本节课的重点知识:平行四边形结构是青少年机器人教育等级测评的二级考点哦!
【单杠机器人(Horizontal bar robot)】
引体向上,有时候简称引体,指依靠自身力量克服自身体重向上做功的垂吊练习。主要测试上肢肌肉力量的发展水平,以及臂力和腰腹力量,在完成一个完整的引体向上的过程中需要众多背部骨骼肌和上肢骨骼肌的共同参与做功,是一项多关节复合动作练习,是较好的锻炼上肢的方法。
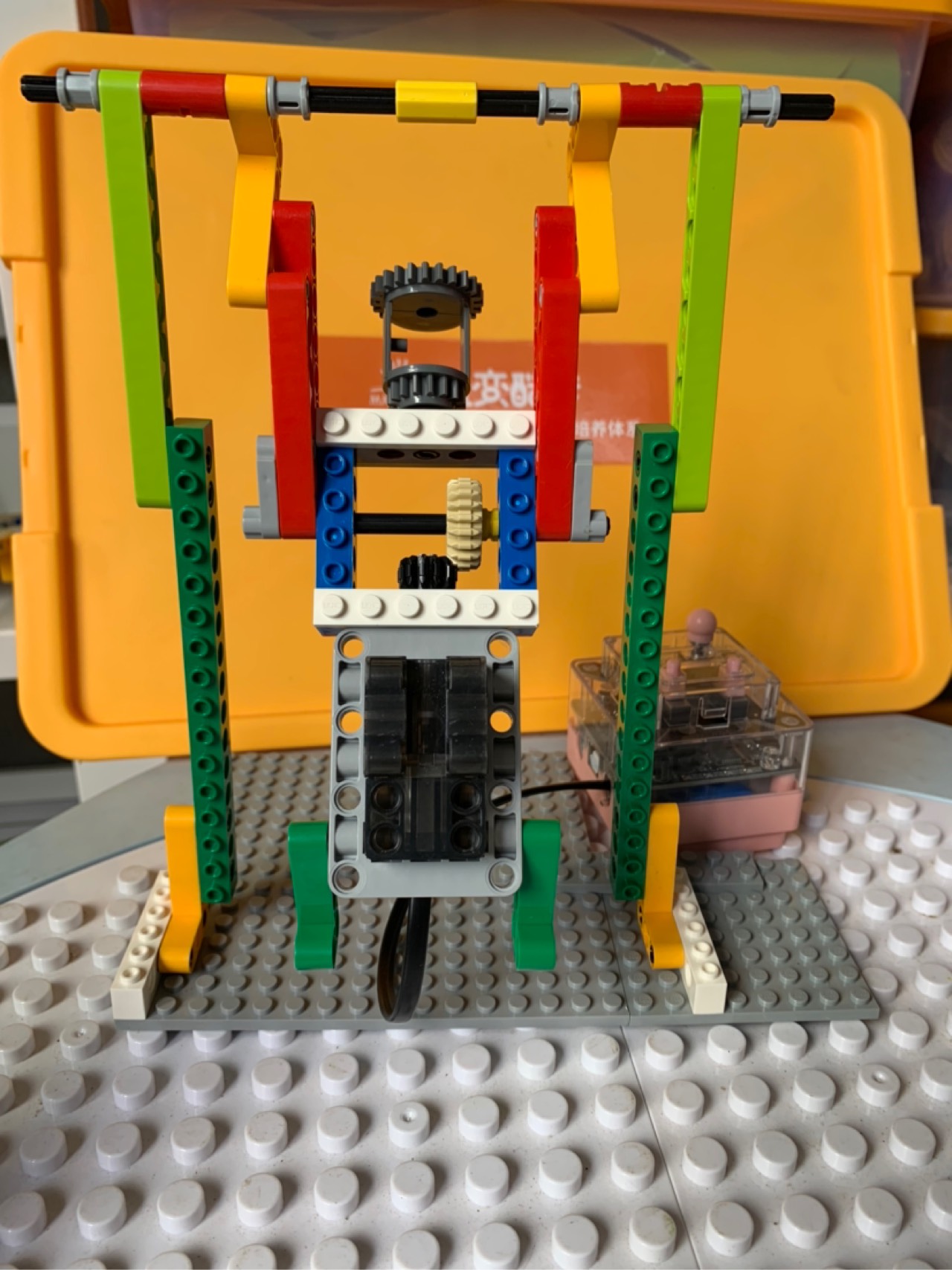
【结构介绍】
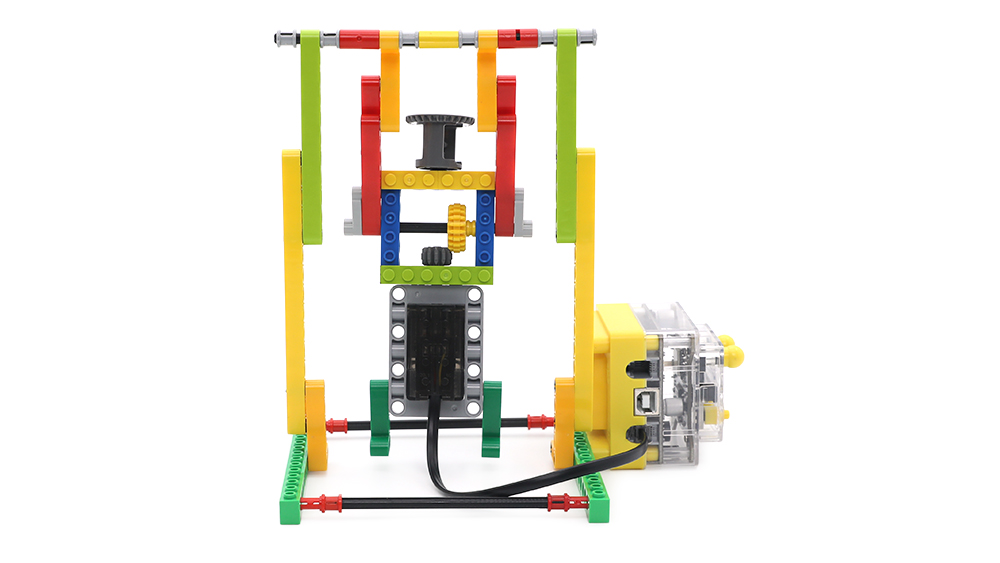
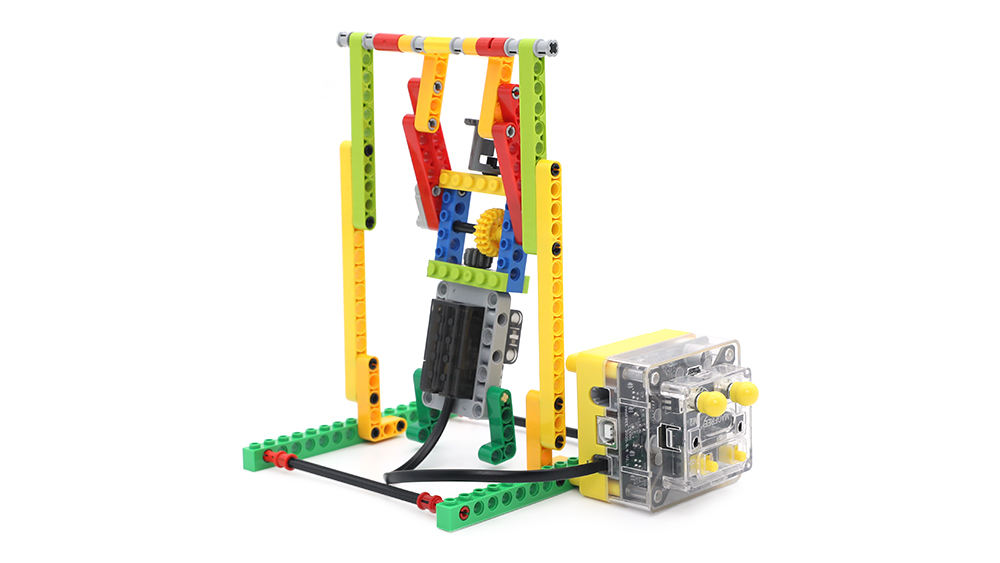
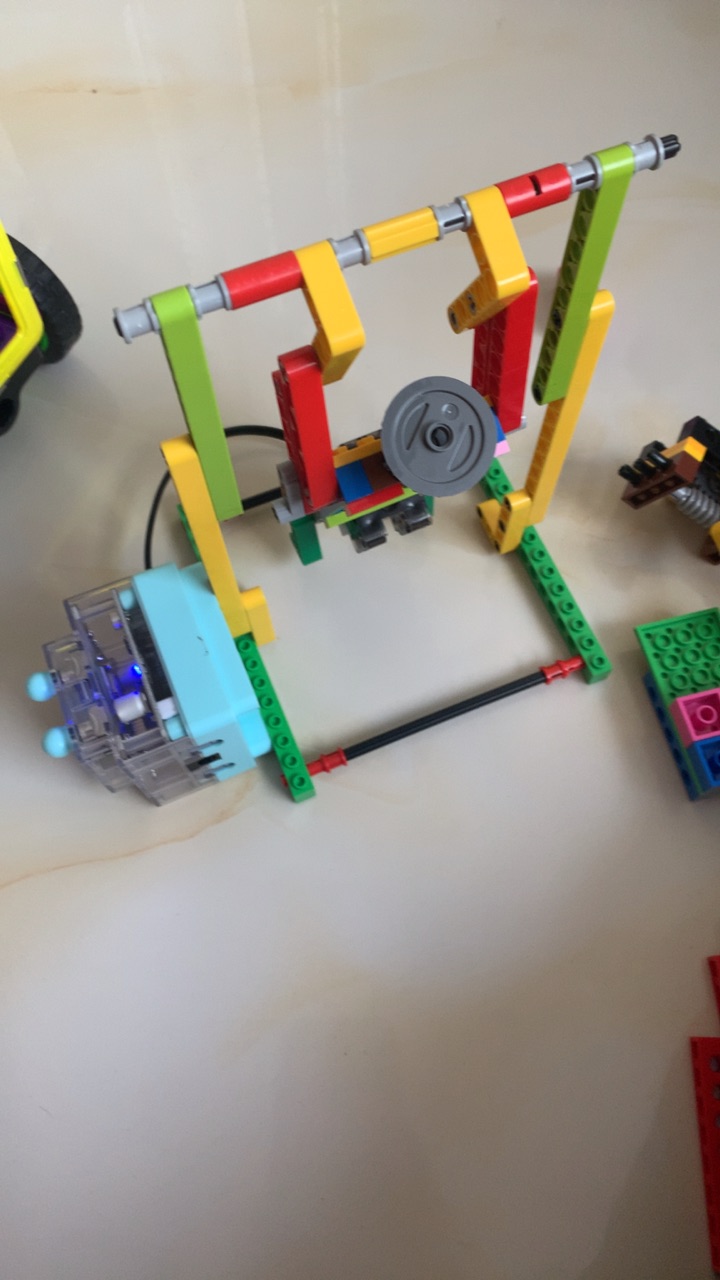
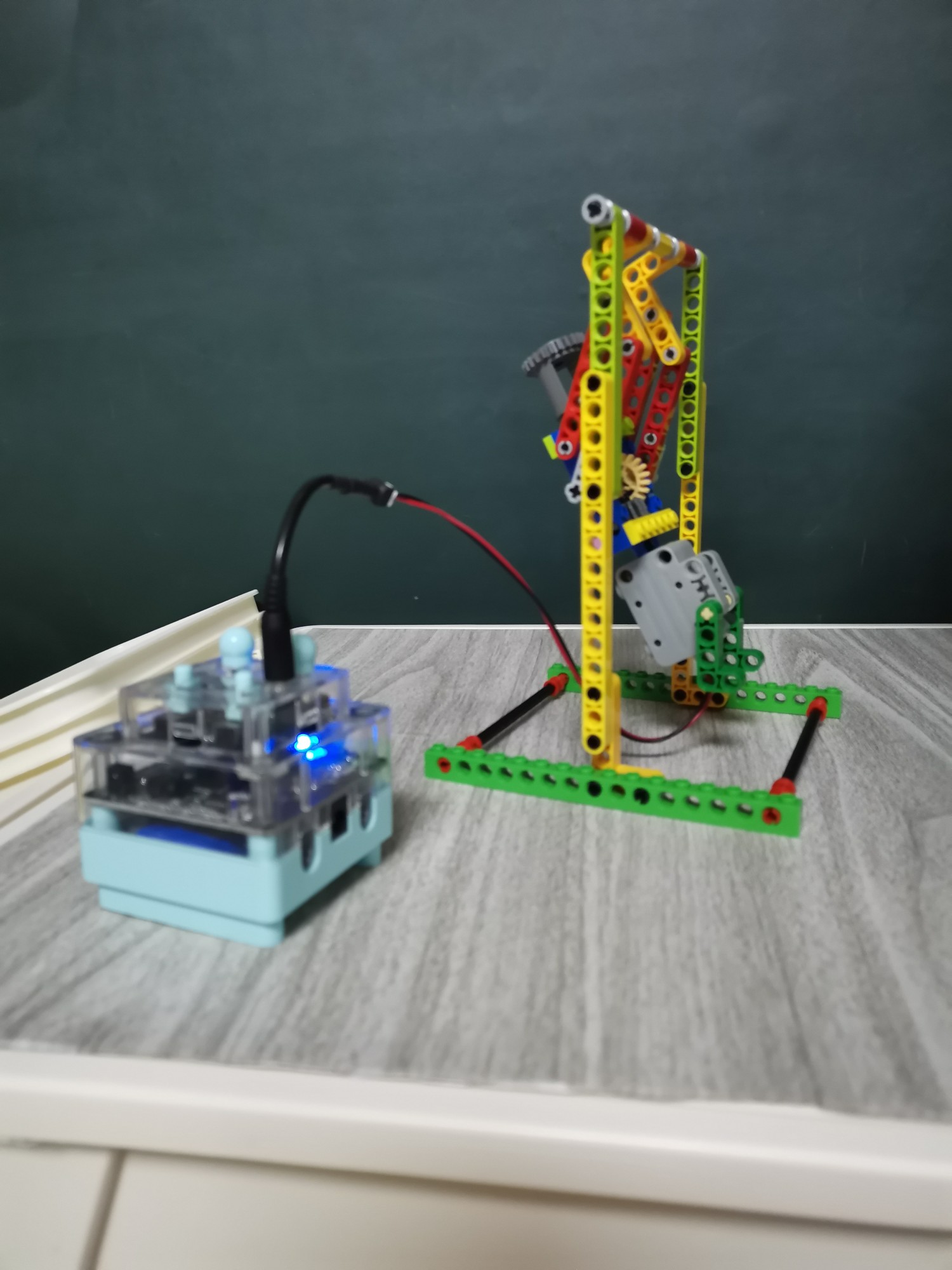
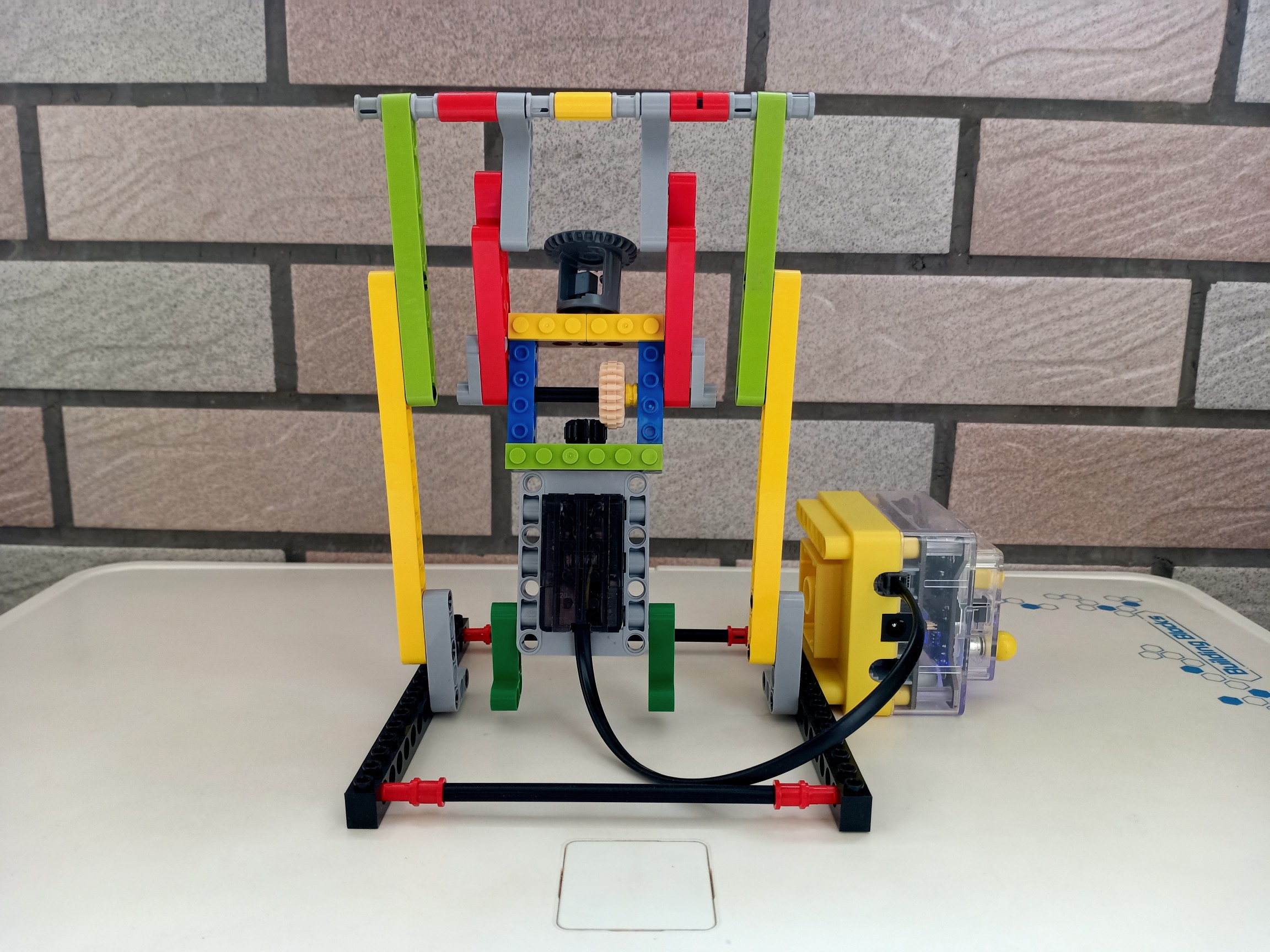
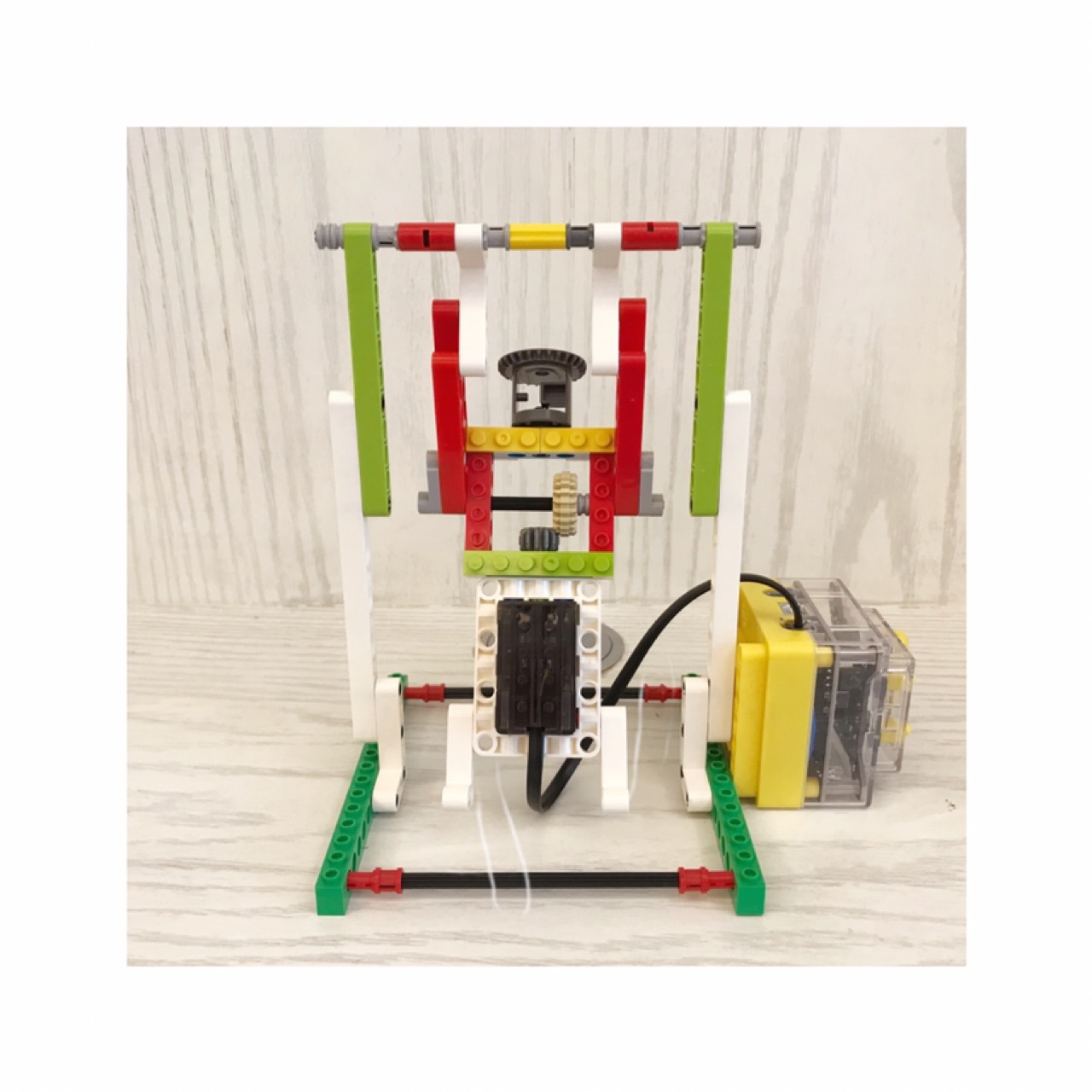
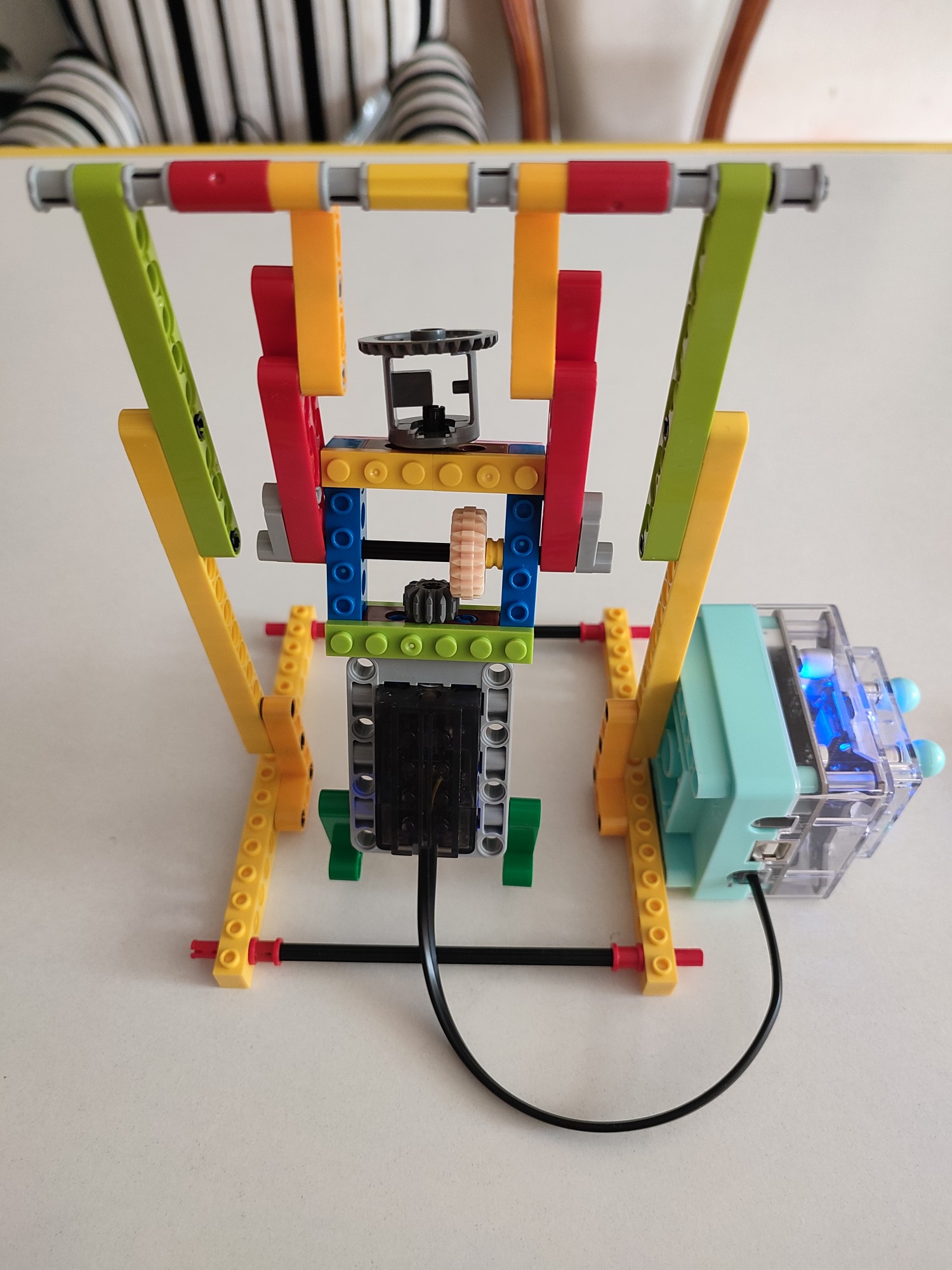
单杠机器人由三个部分组成:单杠、传动系统与机器人;
通过电机的正反转来实现小人向上和向下,其中用到了齿轮的垂直传动和平行四边形结构。本节课的重点是平行四边形结构的应用,机器人的手臂就是平行四边形结构,当它发生形变时,就能带动身体上下运动。
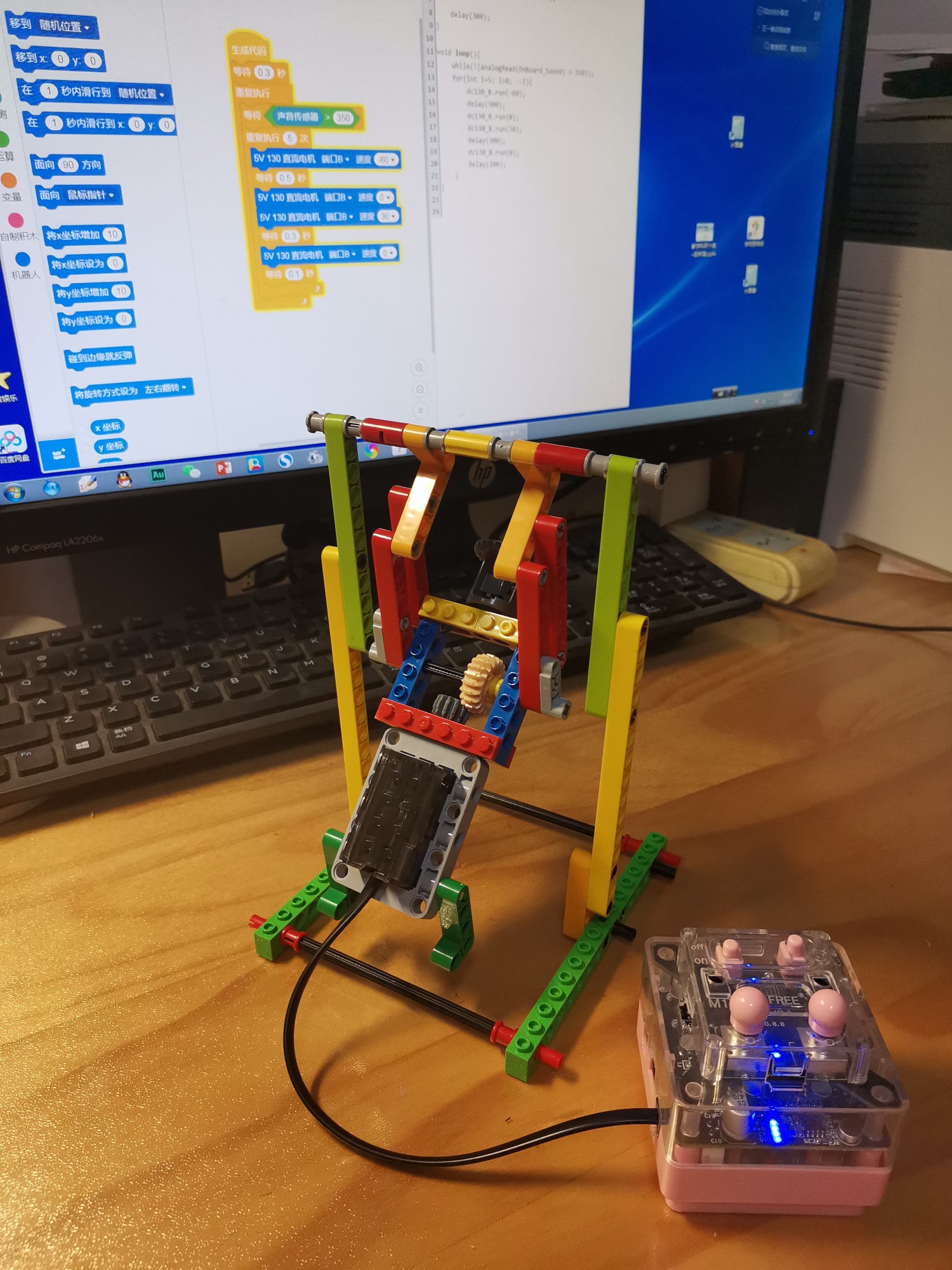
【编程原理】
本次模拟的是单杠机器人做引体向上的动作,等待接收到声音大于350后,小人开始运动。电机反转带动小人向上运动一定高度后,电机停止;随后电机正转带动小人向下运动一定高度后,电机停止。重复执行上下动作5次后,小人停止运动。
【学习目标】
1、了解引体向上的运动特点;
2、学习平行四边形结构的特性;
3、掌握重复执行几次积木代码的用法。
配件明细

5孔直角厚连杆*2

7孔厚连杆*4
7孔直角厚连杆*4
11孔厚连杆*2
15孔厚连杆*2

3孔梁*2

5孔梁*2
15孔梁*2

5×7孔方框梁*1

1×2 片*2
1×3 片*2
1×6 片*2

光滑销*6

摩擦销*15

光滑轴销*2

长摩擦销*2

轴套长销*4

12齿双面锥齿轮*1

20齿双面锥齿轮*1

斜齿差速器*1

销连销*2

摇柄*2

轴连轴*1

4#轴*1

8#轴*2

10#轴*1

12#轴*2

半轴套*1

轴套*6
酷卡侠*1
RJ11小颗粒电机*1
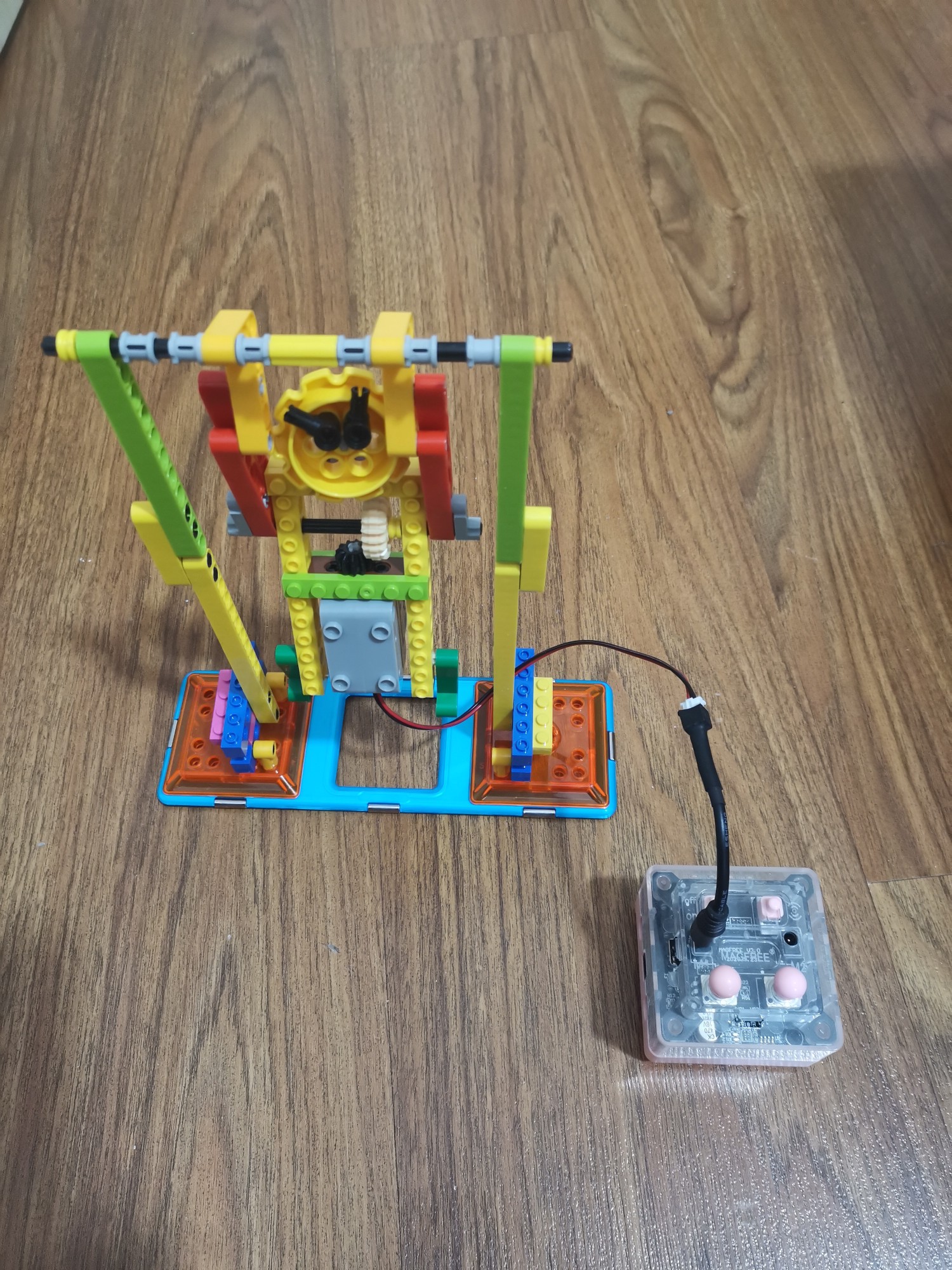
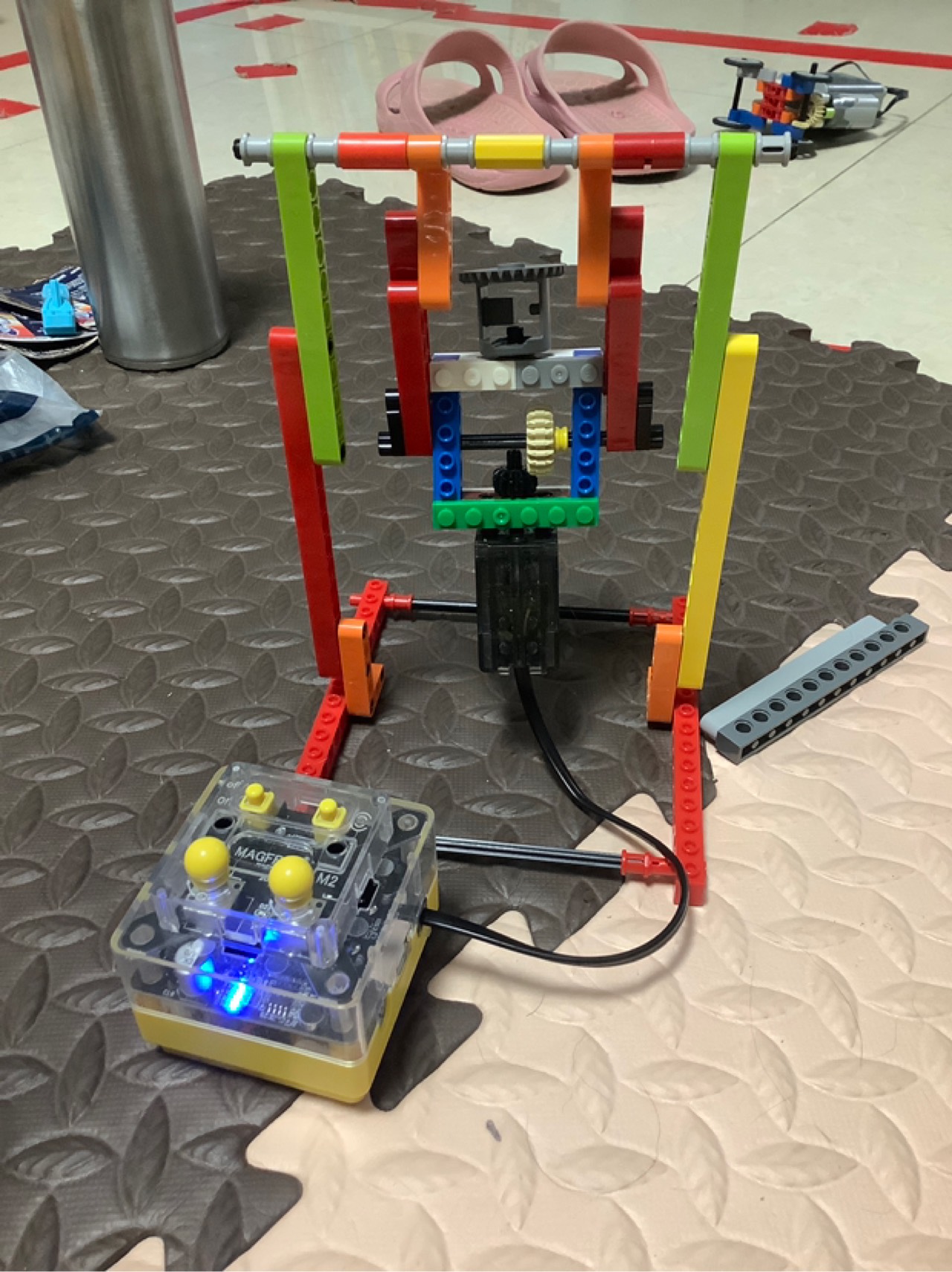
单杠机器人作品
猜你喜欢
第三个酷卡侠编程作品
 微信用户
微信用户
 2021-01-30 15:30:22
2021-01-30 15:30:22
酷卡侠编程
单杠机
 0
0

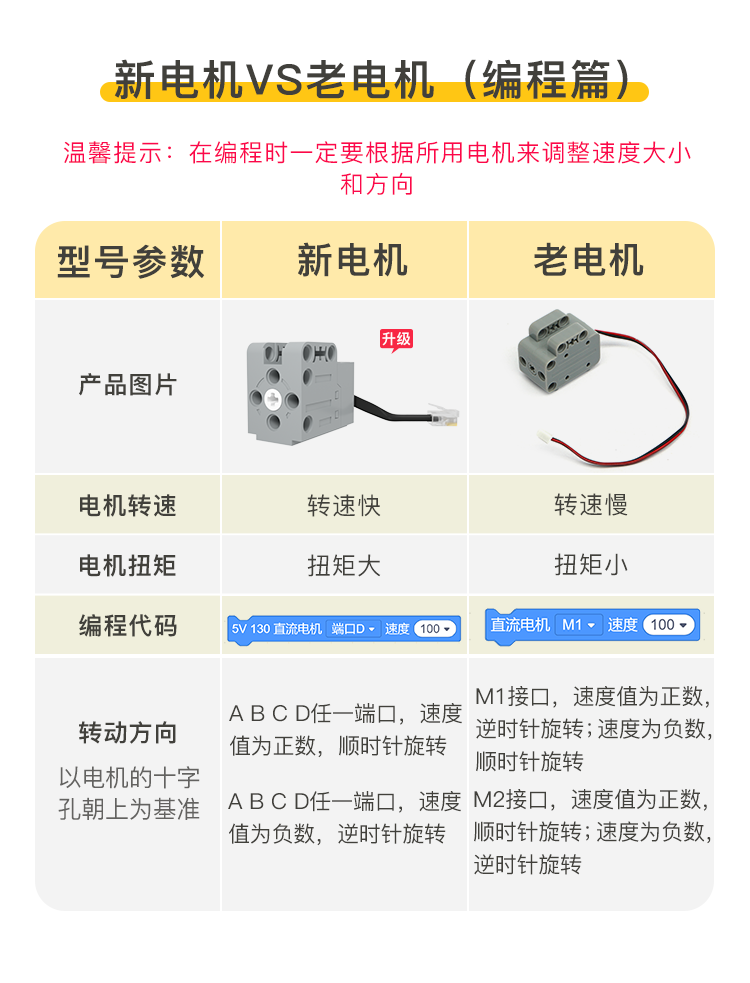
做单杠机器人的时候,反复调试新老电机之间的合适数值,最终完成。拓展造型举重机器人,官方给出了新老电机不同的编程数值,真是很贴心了。完成要求造型后,又改编了一下编程步骤,设置了两个不同的数值,进行顺利,感觉作业也开始渐入佳境,没开始那么难了。
微信用户
2021-02-24 16:17:29
酷卡侠编程
单杠机
0
单杠机器人
微信用户
2021-02-04 14:48:45
酷卡侠编程
单杠机
0
第17个酷卡侠编程,单杠达人
小树苗
2021-02-04 18:42:49
酷卡侠编程
单杠机
0
单杠机器人,听到声音就会自己锻炼身体啦,锻炼5次就自动休息了
CX330
2021-02-05 13:36:35
酷卡侠编程
单杠机
0
第11个作业,单杠小人,很有意思,用的源代码导入。
微信用户
2021-02-06 18:44:13
酷卡侠编程
单杠机
0
这是我的机变库卡scheme是教育学院的第4个酷卡侠作业,运动的小人很好玩,不停的在上下单杠。原来齿轮和齿轮之间有衔接,旋转键和旋转键之间有衔接,连锁起来以后呢,就可以运动起来了,特别的好玩。虽然没有新的小颗粒电机,但是用老式的电机,连接以后意外的发现还是挺好看的。
微信用户
2021-02-07 07:04:45
酷卡侠编程
单杠机
0
机变酷卡研学营第3期,单杠机器人。还是利用平行四边形的特性,做个强身健体的单杠机器人,引申拓展又做了举重机器人、滑雪机器人。整个编程过程还是很简单的,根据实际修改电机转动速度和运行时间,达到想要的效果。新的一年,我们一起来锻炼身体吧!
微信用户
2021-02-28 22:17:38
酷卡侠编程
单杠机
0
🤖️单杠机器人。
张丑丑的妈咪
2021-02-14 20:23:30
酷卡侠编程
单杠机
0

单杠小人
微信用户
2021-02-08 21:47:31
酷卡侠编程
单杠机
0
第二个酷卡侠作业——单杠机器人
熊乔
2021-09-03 23:26:54
酷卡侠编程
单杠机
0

单杠小人,运动起来
声控这个模块用的得心应手了
微信用户
2021-02-11 15:00:14
酷卡侠编程
单杠机
2

