



打鼓机器人
 截止20260519,打鼓机器人课程共{792}人学习过
截止20260519,打鼓机器人课程共{792}人学习过
课程简介
【打鼓机器人(Drumming robot)】
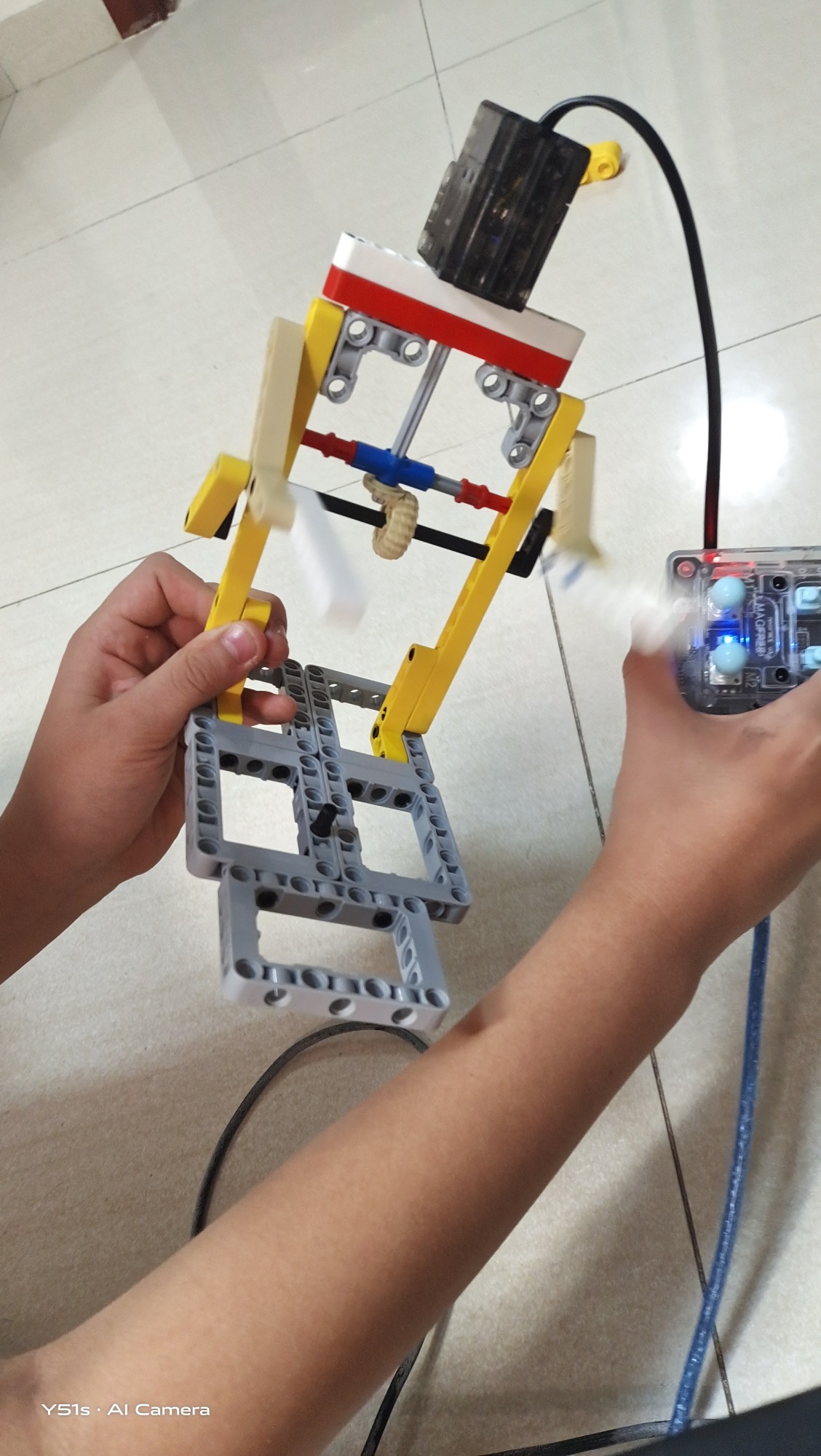
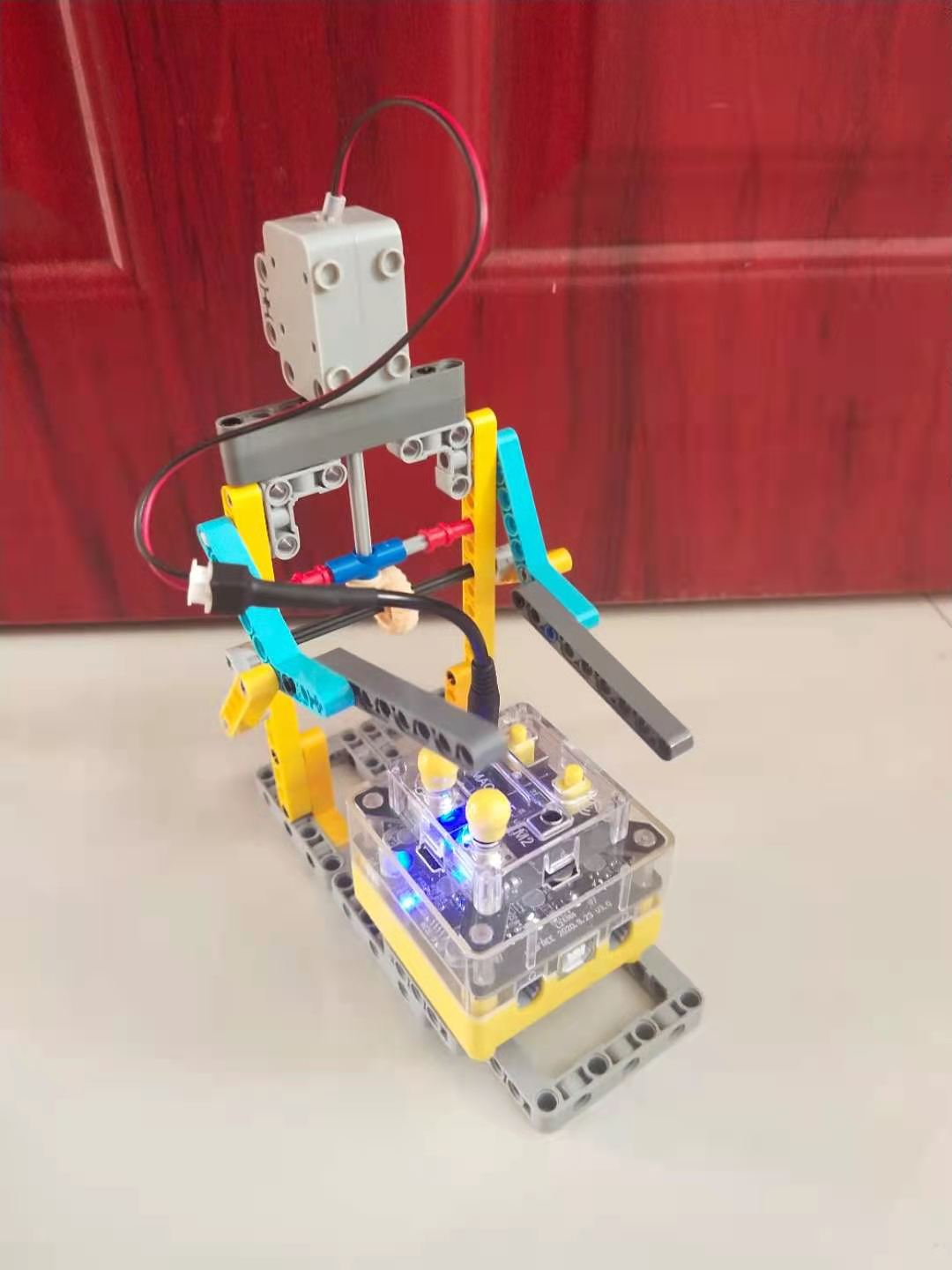
打鼓机器人是一个人形机器人模拟打鼓的动作,电源启动后带动双手上下运动,接触“鼓面”的同时还会发出“嘟”的打鼓声。
【结构介绍】
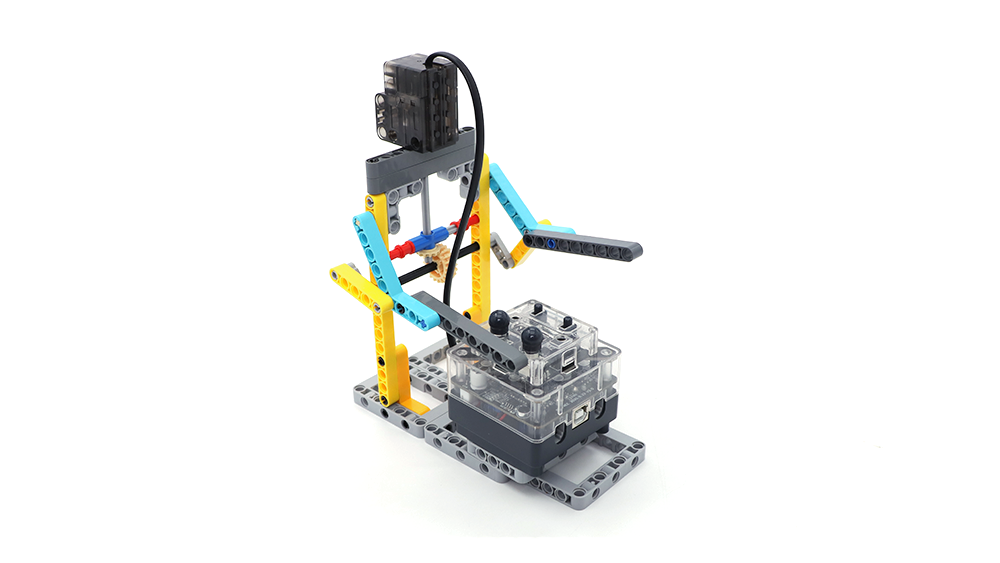
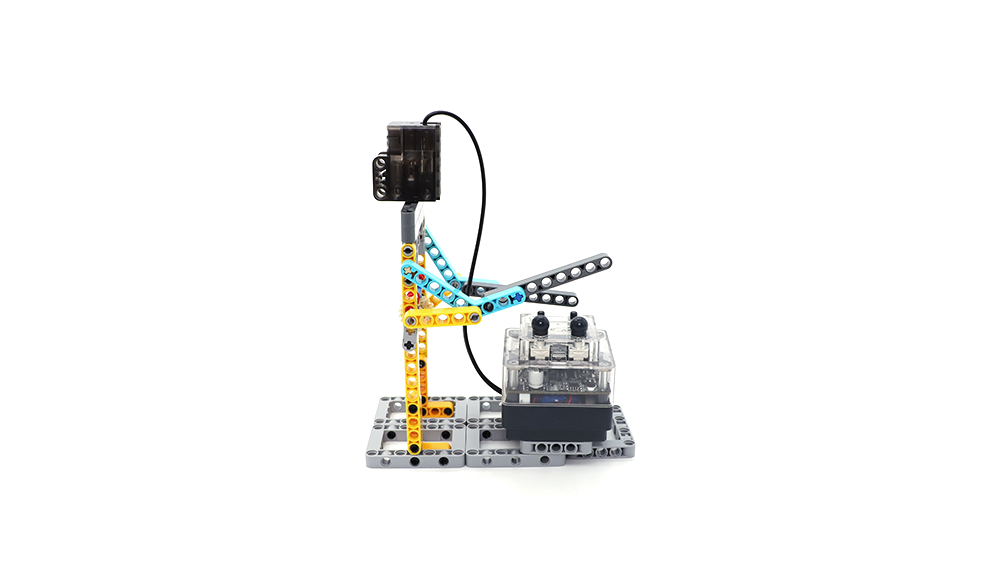
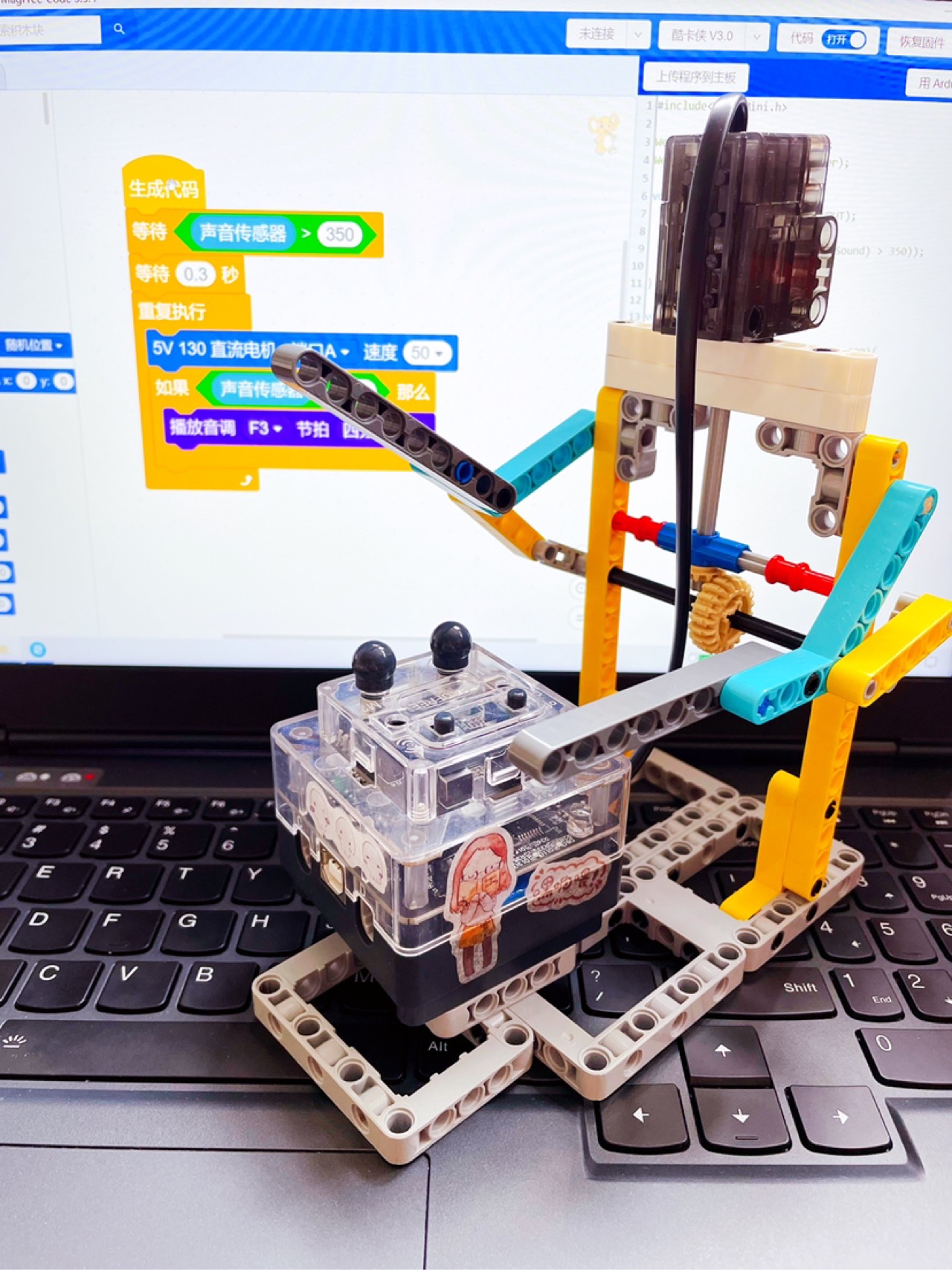
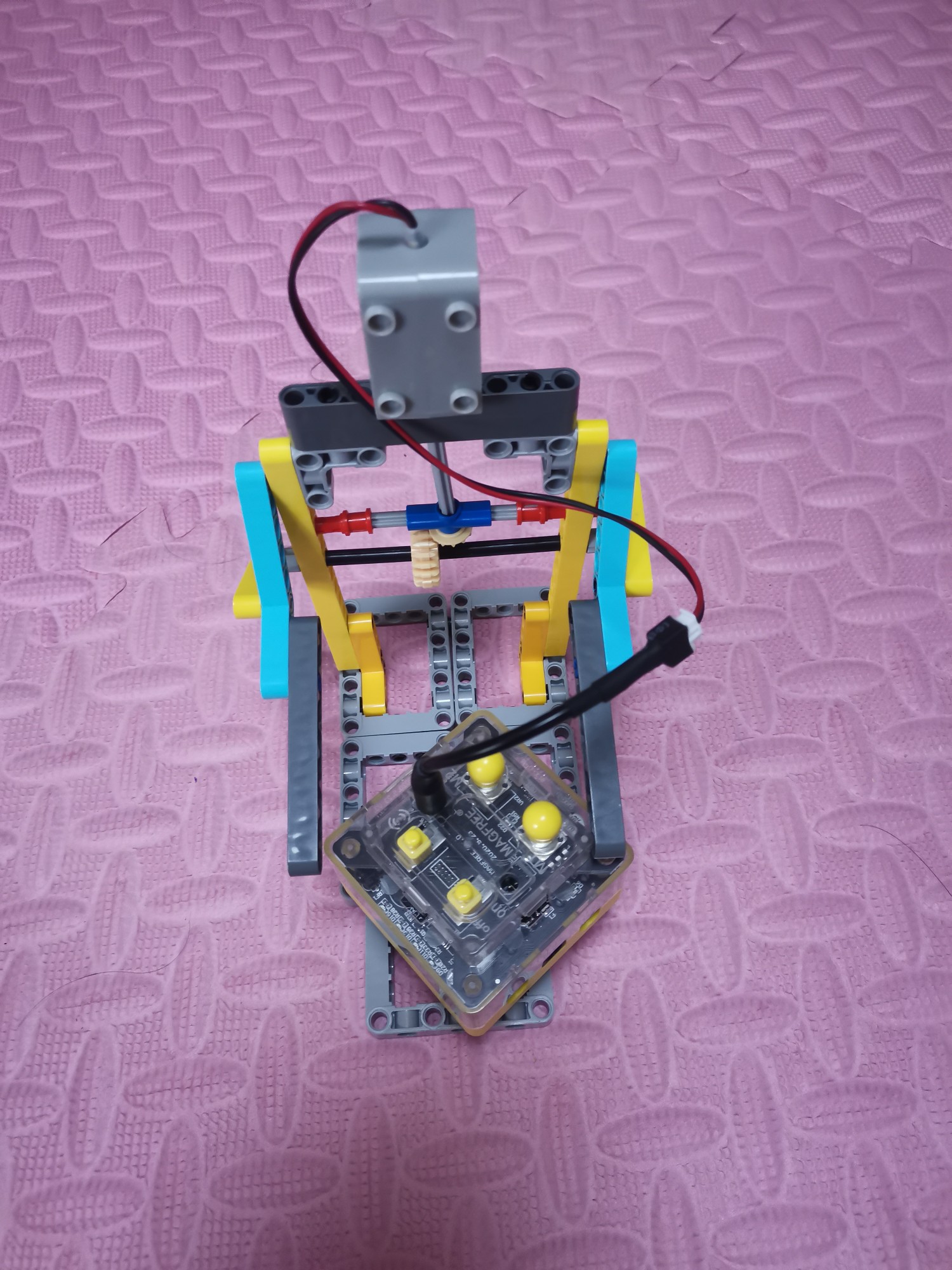
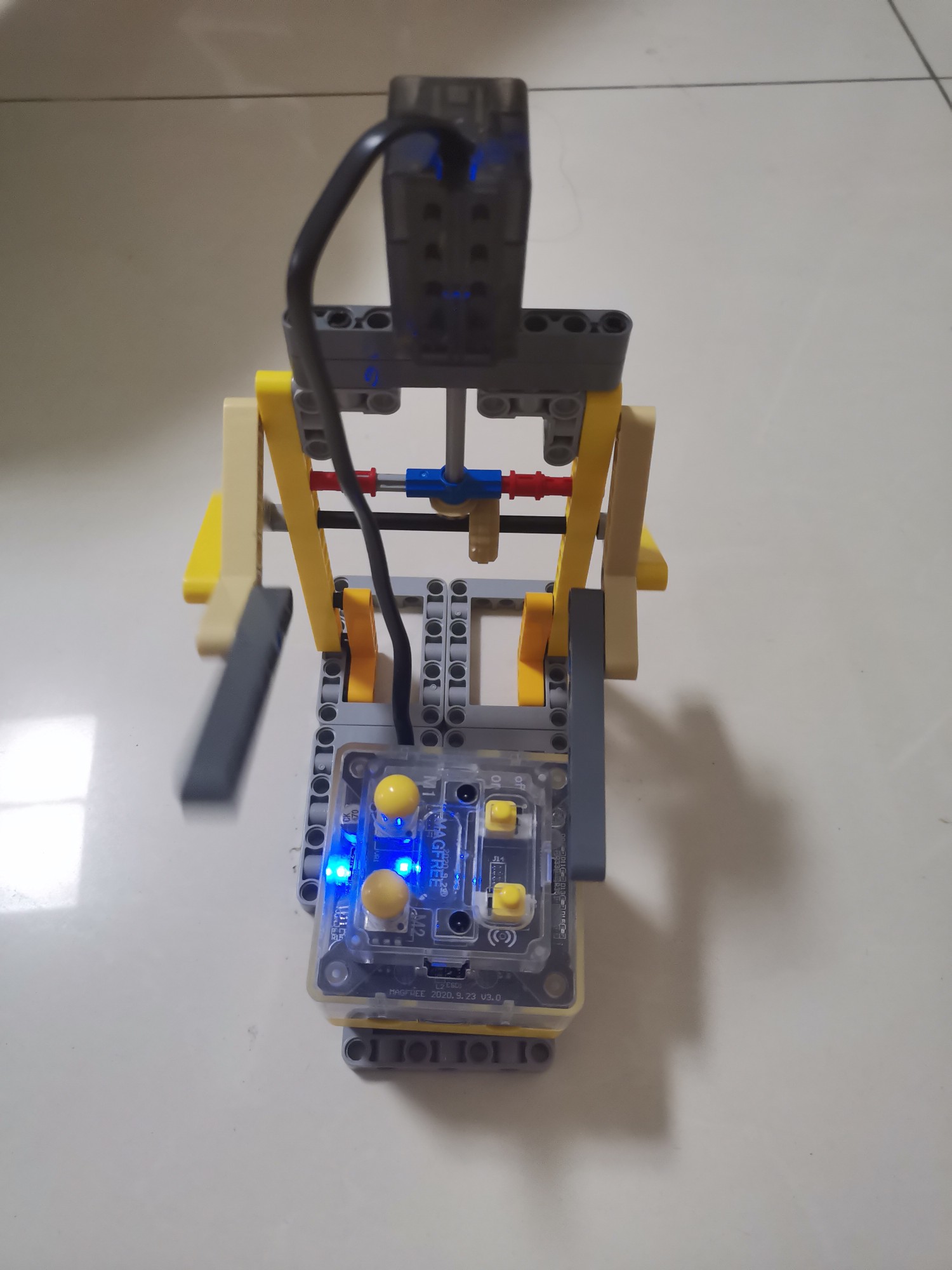
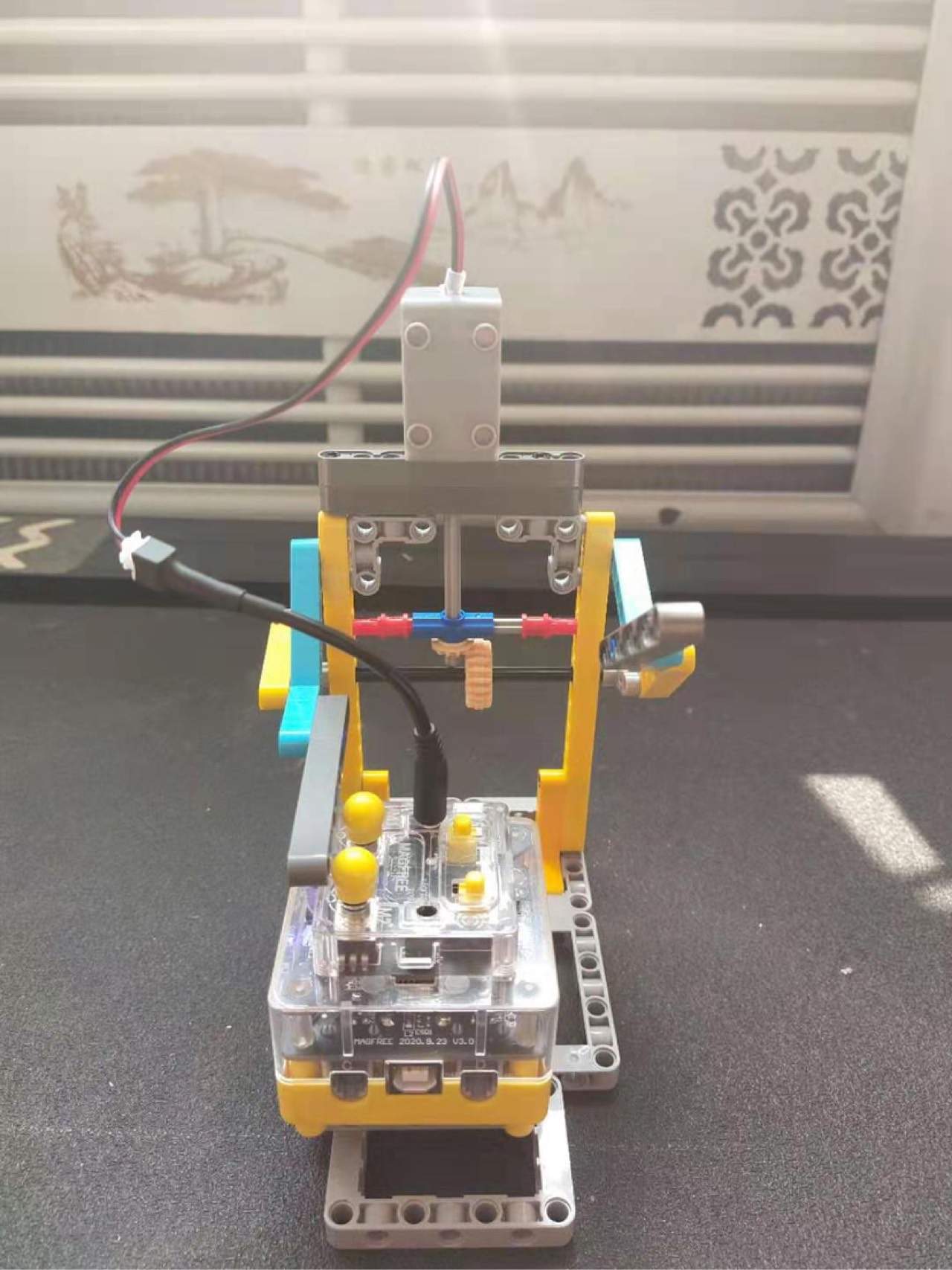
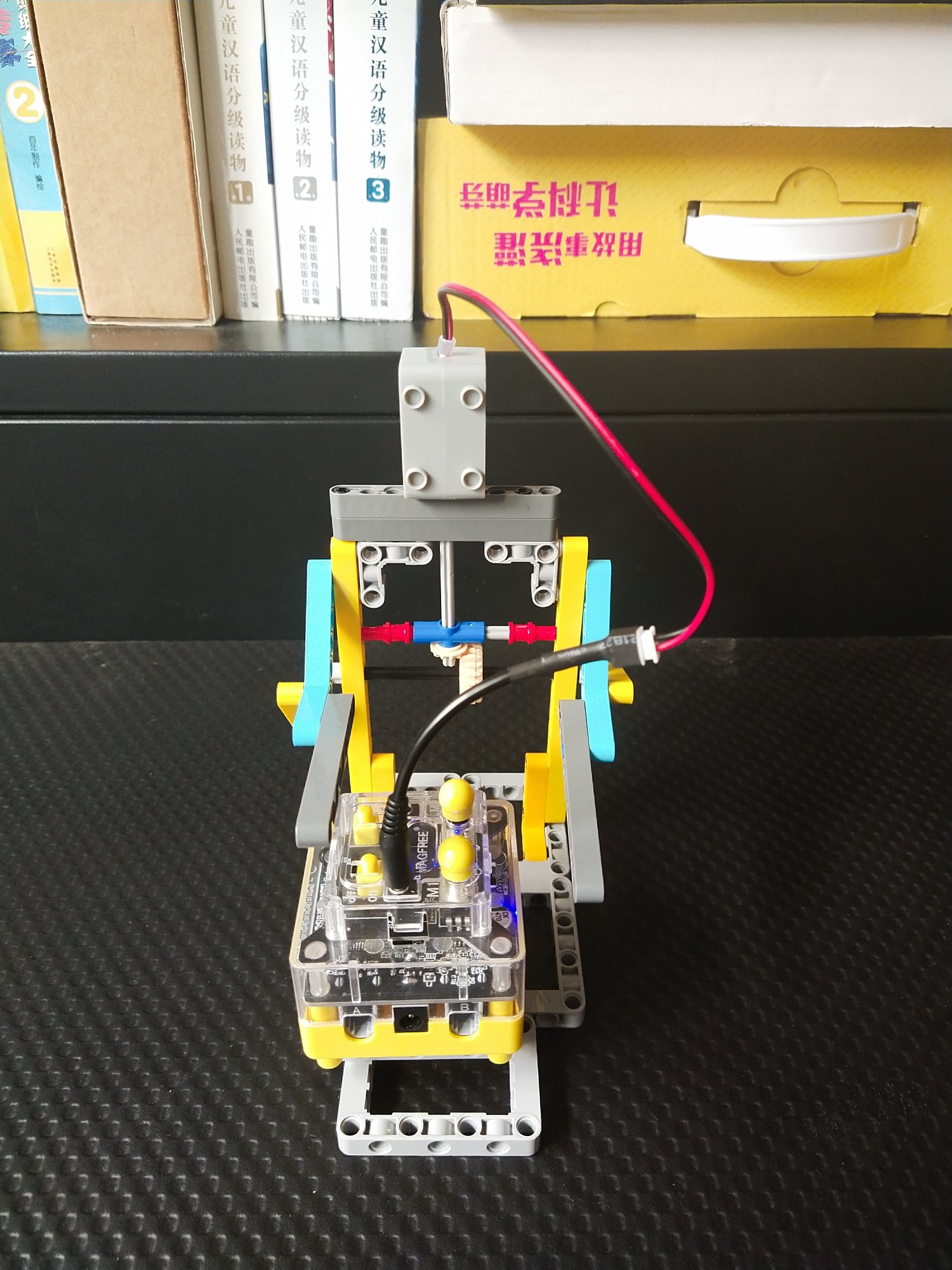
打鼓机器人由三个部分组成:人形结构,鼓以及传动系统;
通过电机驱动传动系统,将力传递到小齿轮上,利用齿轮的垂直传动与曲柄摇杆机构使双手上下运动,模拟打鼓的动作。本节课的重点是曲柄摇杆机构的应用,该机构可以使圆周运动转换成往复运动。
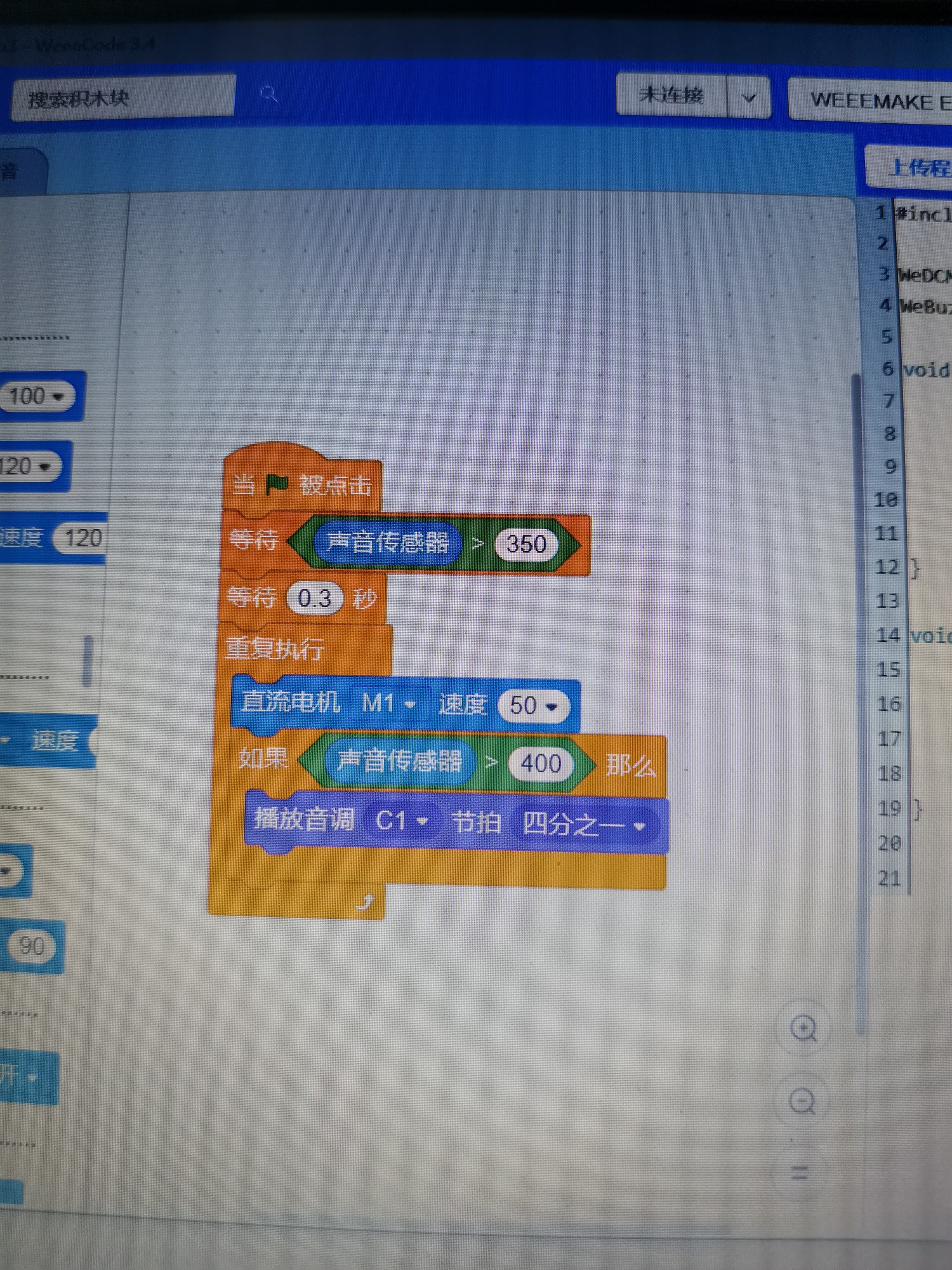
【编程原理】
本次模拟的是机器人打鼓。当程序启动后,等待接收声音大于设定值,电机正转,机器人的手臂开始上下运动;当敲击声触发声音传感器后,发出“嘟”的打鼓声。
【学习目标】
1、了解打鼓机器人的结构功能;
2、学习曲柄摇杆机构的搭建与应用;
3、掌握模拟“打鼓发声”的编程技巧。
配件明细
5孔厚连杆*2
7孔直角厚连杆*2
9孔单弯厚连杆*2

9孔厚连杆*4
15孔厚连杆*2

5×7孔方框梁*6

直角销架*2

光滑销*2

摩擦销*29

光滑轴销*2

摩擦轴销*2

轴套长销*2

12齿单面锥齿轮*1

20齿双面锥齿轮*1

2#夹角连轴器*1

摇柄*2

3#轴*1

9#轴*1

12#轴*1
2#轴*1
酷卡侠*1
RJ11小颗粒电机*1
打鼓机器人作品
猜你喜欢
︒ ⋅
⢀⚙️⋆ 𝕋𝕚𝕞𝕖 𝕨𝕚𝕥𝕙 𝕄𝕒𝕘𝔽𝕣𝕖𝕖 ⠈◦
﹡˘͈ᵕ ˘͈打鼓机器人🤖
 微信用户
微信用户
 2021-07-16 15:08:38
2021-07-16 15:08:38
酷卡侠编程
打鼓机
 0
0

打鼓机器人
垂直齿轮传动应用
微信用户
2021-07-20 19:10:47
酷卡侠编程
打鼓机
0
是我在机变酷卡steam教育学院的第20个课程作品打鼓机器人。
微信用户
2021-07-29 07:26:37
酷卡侠编程
打鼓机
0

打鼓机器人。
张丑丑的妈咪
2021-07-29 15:11:12
酷卡侠编程
打鼓机
0

研学营第9期作品,打鼓机器人。
微信用户
2021-08-01 10:10:01
酷卡侠编程
打鼓机
0
打鼓机器人
微信用户
2021-08-03 22:19:20
酷卡侠编程
打鼓机
0
打鼓机器人
童趣rainbow
2021-08-06 09:36:35
酷卡侠编程
打鼓机
0
小熊打鼓
CX330
2021-08-07 17:44:55
酷卡侠编程
打鼓机
0
打鼓🥁小人
Magfx机变酷卡-马芳
2021-08-08 09:47:00
酷卡侠编程
打鼓机
0
打鼓小人来啦
微信用户
2021-08-08 10:05:08
酷卡侠编程
打鼓机
0

打鼓机器人
jibiankuka
2021-08-08 10:22:08
酷卡侠编程
打鼓机
0
打鼓机器人
微信用户
2021-08-08 16:25:05
酷卡侠编程
打鼓机
0

