六足战甲
 截止20260519,六足战甲课程共{253}人学习过
截止20260519,六足战甲课程共{253}人学习过
课程简介
课程目标:
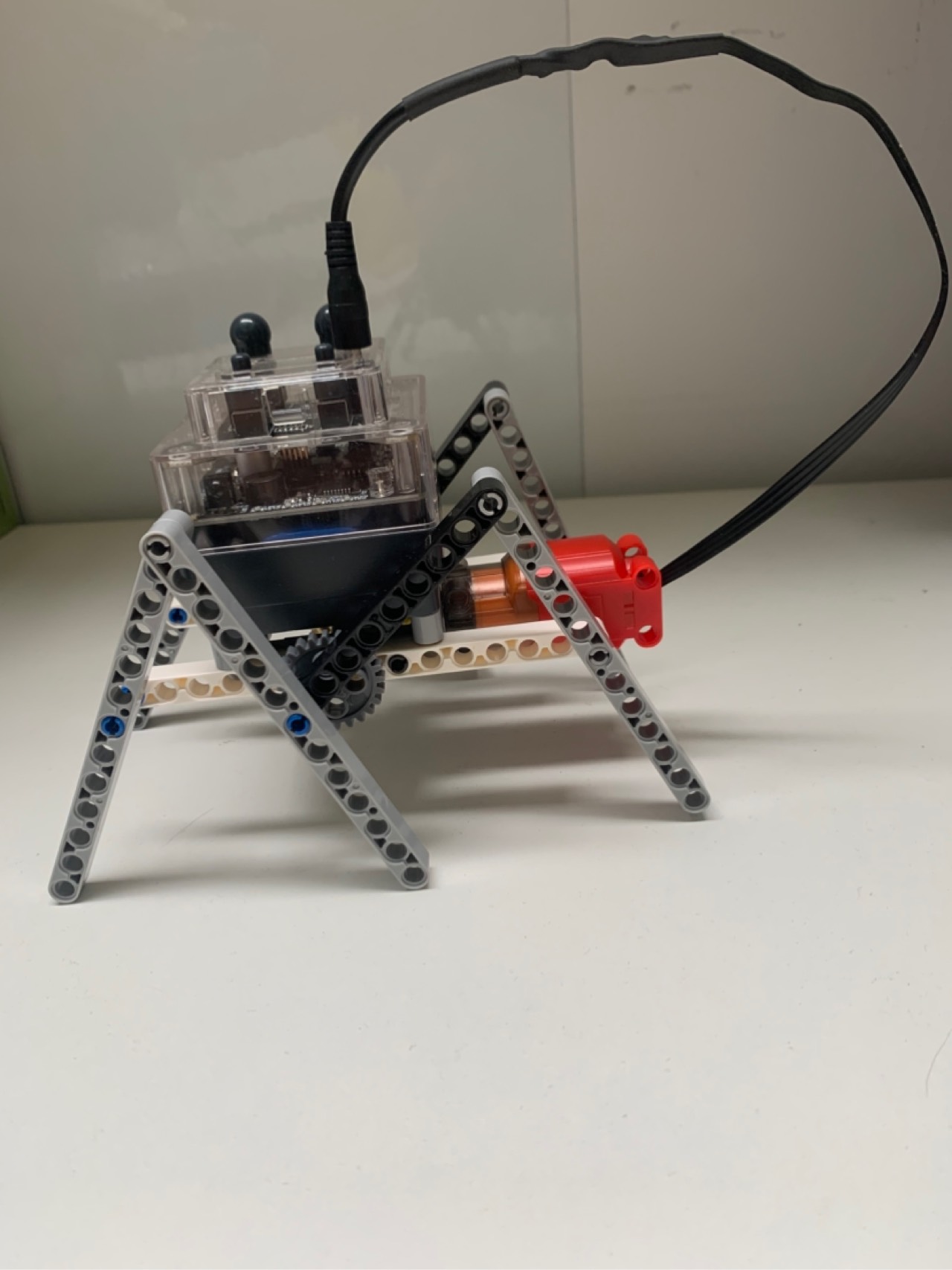
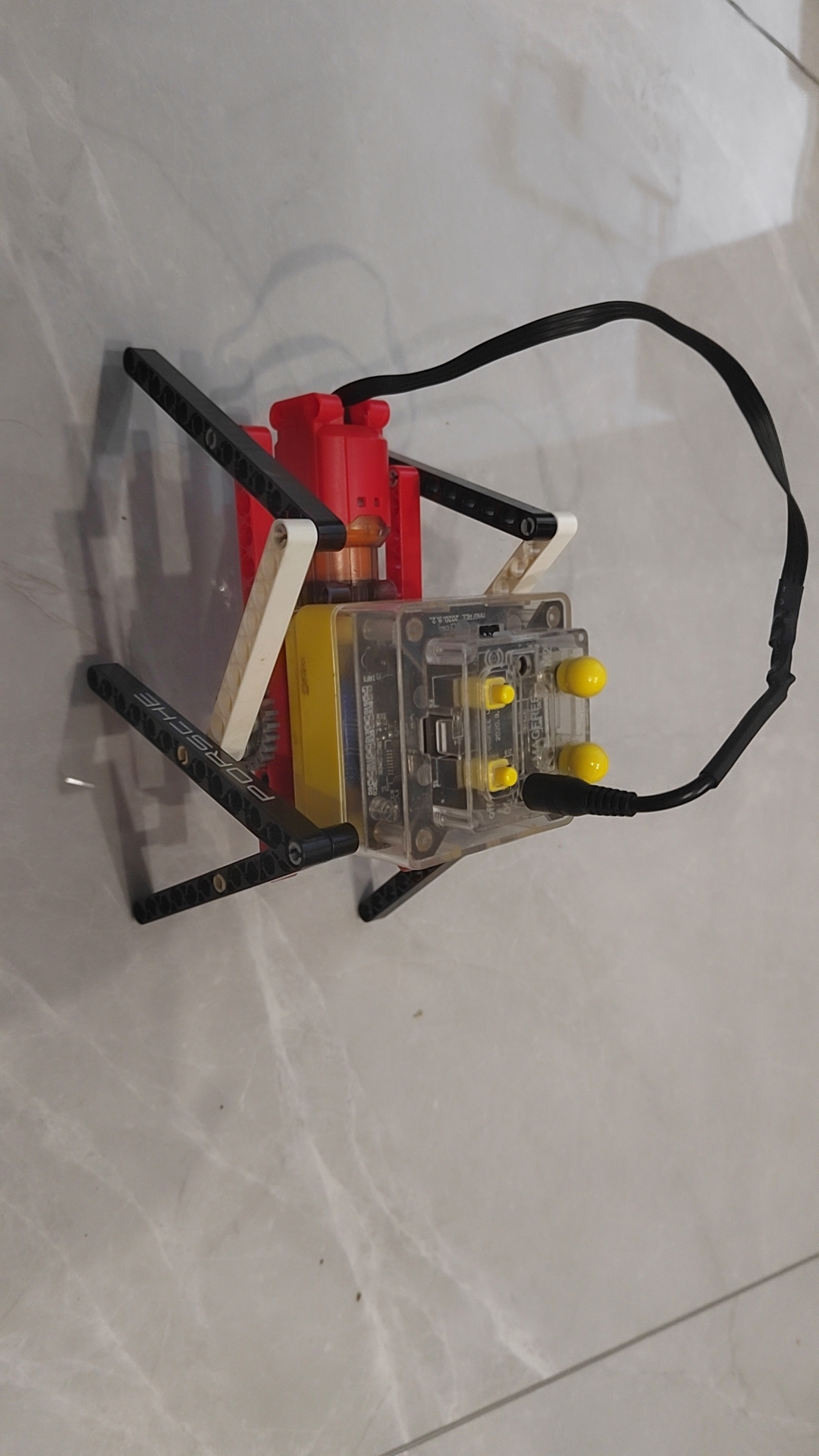
1、六足战甲的搭建方法
2、三角步态
三角步态:
在三角步态中,机器人通常有三个支撑点和三个移动点。以常见的三轮机器人来说,三个轮子就是支撑点。在移动过程中,机器人先让一个轮子向前移动一定距离,此时这个轮子就变成了新的支撑点,而原来作为支撑点的另外两个轮子中,一个轮子开始向前滚动,另一个轮子则成为待移动的轮子。如此循环,三个轮子依次交替移动和支撑,其移动轨迹就形成了类似三角形的形状,所以被称为三角步态。这种步态能让机器人在移动时保持较好的稳定性和灵活性。
配件明细

7孔厚连杆*2

9孔厚连杆*2
13孔厚连杆*6
15孔厚连杆*2

5×7孔方框梁*1

光滑销*6

摩擦销*14

长光滑销*4

12齿双面锥齿轮*1

20齿双面锥齿轮*1

24齿直齿轮*2

4#轴*1

9#轴*1

半轴套*1
酷卡侠*1

DC孔红色小颗粒电机*1